基于FPGA的遠程圖像采集系統設計

狀態機在FPGA內部設計成兩部分,為組幀狀態機(外圈)和組行狀態機(內圈)。其中組幀狀態機各狀態轉移順序及條件見圖4,各狀態占用時間可以通過組行狀態機中的行計數來控制,近而可以完成不同大小規格的圖像的接收。組幀狀態機共有6個狀態。
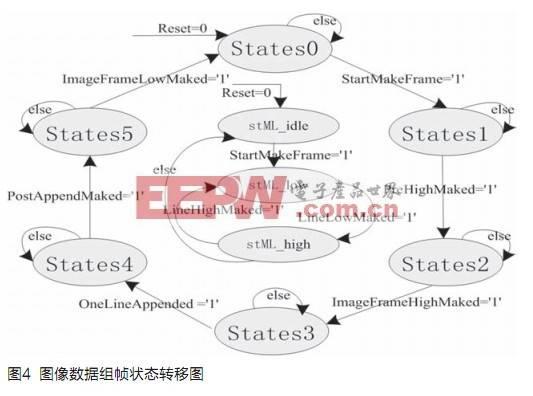
state0:空閑狀態(系統復位)。state1:幀有效期開始到行有效期開始之間的延時。state2:圖像幀有效期,state3:圖像參數幀有效期。state4:行有效期結束到幀有效期結束之間的延時。state5:幀無效期。Reset為輸入的狀態機復位信號,在系統復位狀態,如果用來啟動狀態機的信號StartMakeFrame = 1,狀態機開始工作,進入系統下一狀態,組幀狀態機在各狀態轉移條件滿足時,依次進入下一狀態,否則,保持在原狀態。
組行狀態機共有3個狀態。
stML_Idle:空閑狀態。stML_High:行有效期。stML_Low:行無效期。在外圈組幀狀態機的每個狀態中,包含n個組行狀態,所包含的組行狀態機中的行數即組幀狀態機各狀態所占用時間,組行狀態機和組幀狀態機啟動條件一致,同時啟動。













評論