圖像采集與處理在智能車系統中的應用
—— Application of Image Acquisition and Process in Smart Car System

系統概述
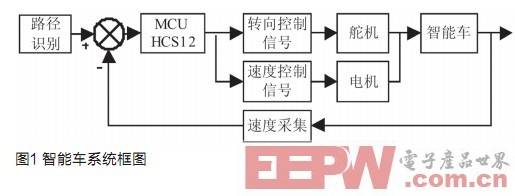
本文引用地址:http://www.104case.com/article/98856.htm智能小車系統主要由路徑識別、速度采集、轉向控制及車速控制等功能模塊組成。路徑識別功能采用CMOS攝像頭,將其模擬量的視頻信號進行視頻解碼后,經過二值化處理并轉化為18×90pix的圖像數據后送入MCU進行處理;轉向控制采用基于模糊控制算法進行調節;而車速控制采用的是經典PID算法,通過對賽道不同形狀的判斷結果,設定不同的給定速度。該系統以50Hz的頻率通過不斷地采集實時路況信息和速度,實現對整個系統的閉環控制,如圖1所示。
智能小車的圖像采集與存儲
圖像采集模塊設計

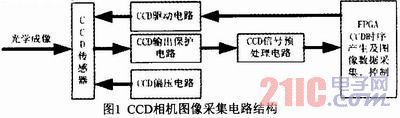
CMOS攝像頭正常供電后,便可輸出原始圖像的信號波形,它是PAL制式的模擬信號,包含行同步、行消隱、場同步、場消隱等信號如圖2所示。但該形式的信號并不能被CPU直接使用,需要加入視頻解碼芯片如SAA7111,它的功能是將攝像頭輸出的模擬信號轉化為數字信號,同時產生各種同步信號,CPU利用此同步信號將圖像的數字信號存儲在一個外部FIFO芯片AL422中,這便構成了基本的路徑檢測模塊,如圖3所示。


















評論