基于攝像頭的賽道信息處理和控制策略實現
作者:上海交通大學電子系 胡晨暉 上海交通大學機械設計與自動化研究所 賈秀江 上海交通大學 自動化系 方興
時間:2009-06-22
來源:
收藏
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
信息處理
本文引用地址:http://www.104case.com/article/95521.htm原始數據包含了黑線的位置信息,為了穩定可靠地提取這一信息,我們采取了以下步驟:
二值化
由于白線對應的電平值較高,而黑線電平值較低,因此圖中第43到48點間的凹槽就是黑線所在位置。為了提取出黑線,直觀的想法是檢測電平值的跳變。但實際黑白線邊沿的電平經常不是突然跳變的,而有一個過渡過程,為此我們先對原始數據進行了二值化處理。這不僅使得邊沿更加明顯,而且可以去除電平值的一些小波動。二值化的結果如圖2所示。
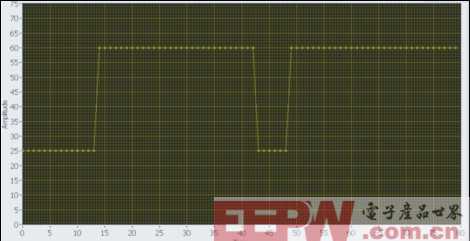
圖2 單行數據二值化結果
黑線位置提取
二值化后,視頻信號就只有黑白二種電平了。從左到右掃描視頻信號,通常先掃到的是白點;否則若是黑點(賽道外),則繼續往下,直到第一個白點。然后,設置一個計數器記錄第一個白點后面連續出現的黑點數目。計數器初值為0,若檢測到一個黑點,則加1;否則計數器重新置0。計數器每次清零前,判斷是否大于2小于10(這可以濾除一兩個黑點產生的毛刺):如果是,則黑線中心位置為當前點的坐標減去計數器值的一半;否則,繼續掃描直到整行結束。最后單行的黑線提取位置如圖3所示。










評論