數(shù)字形態(tài)學(xué)濾波器與智能車路徑記憶
作者:李剛 李蒙 何鎏 天津大學(xué)精密儀器與光電子工程學(xué)院
時(shí)間:2009-06-19
來(lái)源:電子產(chǎn)品世界
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
2) 采樣序列的順序可以直接轉(zhuǎn)化為位移量,便于后續(xù)控制策略處理。相對(duì)于非勻速通過(guò)速度與時(shí)間乘積得到的位移,直接轉(zhuǎn)化得到的位移更準(zhǔn)確(在標(biāo)準(zhǔn)的韓國(guó)賽道上,實(shí)驗(yàn)?zāi)P蛙囍苯愚D(zhuǎn)化得到的賽道長(zhǎng)度誤差小于5cm,速度與時(shí)間乘積得到賽道長(zhǎng)度誤差在10cm以上)。
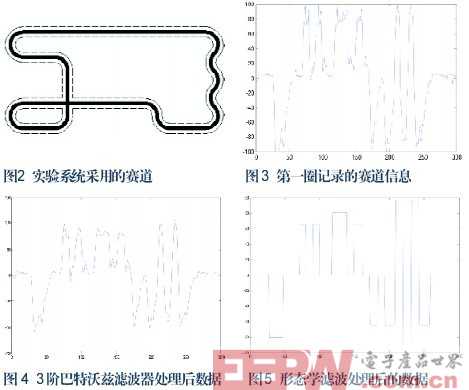
本文引用地址:http://www.104case.com/article/95469.htm實(shí)驗(yàn)系統(tǒng)在圖2所示的賽道上,智能車對(duì)賽道信息的采樣速率為200Hz,以1.5m/s的速度勻速跑完第一圈的數(shù)據(jù)如圖3所示。可以看到在彎道中,舵機(jī)的轉(zhuǎn)角信息存在著嚴(yán)重的毛刺和擾動(dòng),不能直接用于第二圈的控制策略。圖4為matlab中采用3階巴特沃茲濾波處理后的結(jié)果,干擾的抑制效果仍然不理想,而且運(yùn)算量偏大,單片機(jī)難以承受。圖5為采用形態(tài)學(xué)濾波處理后的數(shù)據(jù),賽道信息完整準(zhǔn)確,可以較好的應(yīng)用于后續(xù)控制策略。




















評(píng)論