基于支持向量機方法的車型分類技術
——

下面對所選取的特征值進行簡要介紹。
本文引用地址:http://www.104case.com/article/87263.htm1)幾何特征
反映在視頻圖像上的車輛的長度和寬度是車型識別最直觀的信息,它可以從車輛定位過程中直接獲取,如圖1(b)所示。
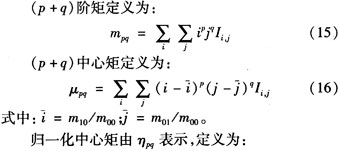
2)不變矩特征
矩特征由于旋轉不變的描述特性和良好的抗噪性得到了人們的重視,圖像的矩特征實質上是該圖像整個空間特性的集成。在相繼提出的多種矩特征中,當前最常用的有Hu矩、Li矩、Zernike矩。考慮到實際情況和算法的實效性,本實驗采用Hu的區域矩作為矩特征。
假定{Ii,j}表示高度為H、寬度為W的當前輸人灰度圖像,其中Ii,j為第i(0≤i≤H-1)行、第j(0≤j≤W-1)列像素的灰度值。

3)紋理特征
前面提取的長度、寬度和不變矩特征可以對車輛的大小形狀進行較好的全局描述,為車輛大小的識別提供了很好的依據。但對于客貨車的識別,特征差異往往表現在局部紋理上,如果僅用上述特征來區分客貨可能會導致一些形狀相似的客貨車識別錯誤。因此,引入了由共生矩陣導出的5個描述子。
由車輛圖像生成的問隔為d、方向為θ的灰度共生矩陣為:

式中:k、m表示橫坐標;l、n表示縱坐標;g1、g2表示灰度等級;e為集合中元素的個數;eT表示像素對的總和數;p(g1,g2)表示灰度級分別為g1和g2的像素對出現的頻率。
由上述共生矩陣導出的5個紋理特征為:
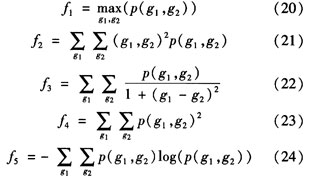
式中:f1為最大頻率;f2為對比度;f3為反差矩;f4為角二階矩;f5為熵。
考慮到實際車輛的紋理特征,取d=1、θ=0。
由于所提取的特征可能在量值上有很大差異,為了避免大值特征湮沒小值特征對分類的貢獻,將所提取的特征進行歸一化非常重要。本文采用如下公式對特征進行歸一化:
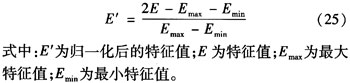
經過歸一化處理后,各特征值的范圍被限定在[-1,1]之間。





評論