iCAN系列功能模塊及其在起重力矩限制系統中的應用

1 引言
本文引用地址:http://www.104case.com/article/87262.htm現場總線技術是用于現場儀表與控制系統之間的全分散、全數字化、智能、雙向、百聯、多變量、多點、多站的串行通信系統。CAN-bUS總線是國際上應用最廣泛的現場總線之一。國內CAN-bus總線應用廣泛,但大多數對CAN-bus總線的應用還處于基礎階段,沒有真正發揮CAN-bus總線實時、可靠的優勢,主要體現在應用層協議的選擇。目前占領市場的兩個應用層協議是DeviceNet協議和CANopen協議。但兩者規范比較復雜,理解和開發難度較大,用戶在前期開發階段需投入大量的資金和人力,不適用于簡單的基于CAN總線控制網絡。因此就有必要開發一種簡單可靠的CAN高層協議,以適用于CAN總線簡單應用場合,由此誕生了iCAN系統及iCAN協議規范。
2 iCAN系統及iCAN協議規范
2.1 iCAN系統
iCAN系統全稱為"工業CAN-bus現場總線控制系統(Industry CAN-bus Fieldbus Control System)",是一種基于CAN-bus的現場總線控制系統。iCAN系統提供一個低成本的通信鏈路,主要用于實現CAN-bus應用中的通信控制和數據采集。iCAN系統具有構建靈活、結構簡單、成本較低的優點,由于采用CAN-bus總線,iCAN系統還具有良好的可靠性和穩定性。同時,還具有易于組態,安裝、運行、維護簡便的特點。它使用CAN-bus總線將工業現場設備(如傳感器、儀表等)與管理設備(PC、工控機、PLC等)連成網絡,無需昂貴的連接線路。iCAN系統主要由iCAN協議、iCAN系列功能模塊和PC-CAN接口卡構成。
2.2 iCAN協議
iCAN協議全稱為"Industry CAN-bus Application Protocol",是現場總線CAN-bus的最新應用層協議之一,具有理解簡單、易于實現、實時可靠的特點。它采用與CANopen、DeviceNet協議基本相同的連接管理方式,刪除了較復雜的握手管理、資源分配等內容,并使用預定義數據組合方式管理CAN-bus總線上的節點。它在汲取DeviceNet和CANopen協議精粹的基礎上,充分繼承發展了基于連接和對象尋址兩種核心功能。支持多種傳輸方式,包括輪詢方式、狀態觸發方式以及定時循環方式,還根據實際情況,除去了諸如復雜的基于對象模式、通信波特率限制等因素,以高效精練的協議,保證數據通信的可靠性、實時性,有效降低了硬件成本。iCAN協議授權支持行業客戶免費使用,開發基于iCAN協議的產品不需要支付額外的協議費用。
3 iCAN系列功能模塊原理
3.1模塊型號簡介
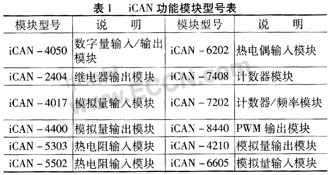
表1為iCAN功能模塊型號表。iCAN功能模塊集成有CAN-bus通訊接口和iCAN應用層協議,提供DI、DO、AI、AO、RTD、TC、計數器、頻率計等數據采集功能,為主控PC與現場設備之間提供完整的信號采集與通訊功能。 3.2模塊內部結構(以iCAN-4050模塊為例)
iCAN-4050功能模塊原理框圖如圖1所示,是由微處理器、電源、CAN通信接口、設置開關以及輸入/輸出處理電路組成。根據模塊功能不同,有些模塊采用8位的單片機作為微處理器,有些采用16位甚至32位的ARM微處理器。而在CAN通信接口的設計采用獨立的CAN控制器SJA1000T與微處理器相連。不同模塊的輸入/輸出電路都是根據自身的功能設計。為了提高模塊的抗干擾性,有些模塊的微處理器和輸入/輸出單元之間采用光電隔離(HllLl光電隔離器件)避免外界干擾噪聲。采用直流電源供電,供電電源范同是+10 V~+30 V。因此,即使在工業現場電源電壓產生波動,模塊也能獲取穩定的工作電源。模塊電源同時提供反接保護,以防止因電源的接線錯誤而導致模塊損壞。
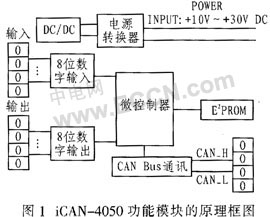
模塊工作時,將輸入的電壓型數字信號或無源觸點信號經訓理后,送人微處理器,通過CAN總線通信將輸入的數字信號狀態傳送到網絡中的主控設備,主控設備可通過CAN總線將輸出的數字量狀態傳送到模塊,控制外部開關。通過運行硬件看門狗監控模塊,防止模塊死機,有效提高模塊的可靠性。
4 起重力矩限制系統中的應用
4.1系統簡介
起重力矩限制系統是汽車起重機控制系統 的一個重要組成部分。系統通過對起重機械中長度傳感器、角度傳感器以及壓力傳感器等輸出數據分析處理,實時監控系統工作時起重力矩,保證起重機工作在安全狀態下。而且系統能夠實時記錄起重機作業中的危險工況,為事故的分析處理提供可靠依據。系統要求能夠實時采集長度傳感器、角度傳感器以及壓力傳感器的輸出數據,其中長度傳感器、角度傳感器以及壓力傳感器的信號輸出類型主要為電壓或電流信號,傳感器信號共有4路。此外系統要求提供4路數字量輸出通道。
4.2系統解決方案
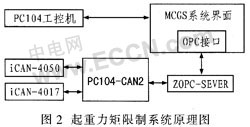
系統采用高可靠性的PC104工控機,人機接口采用10.4″觸摸式TFTLCD顯示器,提供鍵盤控制。人機界面用MCGS組態軟件編寫系統組態界面。PC104-CAN2雙路CAN接口卡通過CAN總線模塊iCAN-4017、iCAN-4050采集各傳感器輸出數據,實時獲取系統工作狀態及數據參數,通過ZOPC-SEVER服務器傳輸到工控機的組態系統中,同時組態系統作為服務器向工控機提供數據,工控機接收相應數據后進行分析處理,系統工作狀態實時在人機界面上顯示。系統能夠警示危險工況,診斷并排除故障。在危險工況下,通過實時控制輸出模塊,使系統處于安全狀態,防止事故發生,并在危險工況時提示操作人員,操作人員根據鍵盤指令進行相應控制。起重力矩限制系統的原理圖如圖2所示。
4.3模塊外部接口
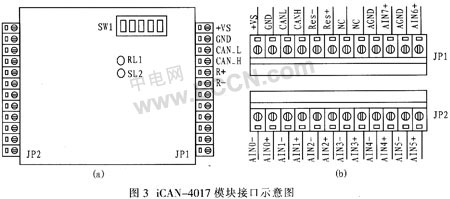
iCAN-4017模塊具有接口及設置開關如圖3(a)所示,模塊內部各接線端子、撥碼開關、跳線器以及指示燈功能說明如下:SW1為模塊CAN波特率以及MAC ID設置開關;RL1為電源指示燈;SL2為網絡通訊指示燈;JP1為DC電源、CAN通訊接口以及模擬量輸人信號通道接線端了;JP2為模擬量輸入信號通道接線端子。
iCAN-4017模塊的接線端子JP1、JP2引腳定義如圖3(b)所示。+VS為+10 V~+30 V DC電源正端:GND為+10 V~+30 V DC電源負端;CANL為CAN通訊信號CAN_L端;CANH為CAN通訊信號CAN_H端;Res-為接CAN網絡終端匹配電阻;Res+為接CAN網絡終端匹配電阻:Ain0+~Ain7+為接模擬量輸入通道0~7信號正端;Ain0-~Ain5-為接模擬量輸入通道0~7信號負端;AGND為模擬量輸入通道6、7輸人參考地;NC為未用端。
4.4系統軟件設計
本系統采用組態軟件的開發方式。用戶無需了解iCAN系統原理,只需清楚系統有哪些被測和被控信號;市面流行的組態軟件都支持OPC接口,用戶可采用熟悉的組態軟件開發,提高開發效率;易于開發出圖形化控制系統。本系統采用MCGS組態軟件和ZOPC服務器。軟件開發包括配制ZOPC服務器、在MCGS中添加OPC設備和編寫MCGS應用工程三部分。由于后面兩部分比較簡單,下面給出配置ZOPC服務器的流程框圖,如圖4所示。
4.5系統方案的特點
利用iCAN協議、iCAN系列功能模塊和PC-CAN接口卡.通過CAN-bus總線實現各傳感器信號采集以及輸出裝置控制,使得系統容易構建,布線安裝方便;同時系統抗干擾能力強、可靠件高、實時響應性好。而且通過CAN-bus總線的應用,使該起重力矩限制系統易于作為一個子系統嵌入到起重機的控制系統中。通過實際的運行測試表明,該系統運行穩定、可靠,維護接口方便,性價比高。

5 結束語
重點介紹了iCAN系列功能模塊的原理及應用,并介紹了iCAN系統和iCAN協議的概況,iCAN協議授權支持行業客戶免費使用,開發基于iCAN協議的產品不需要支付額外的協議費用,這使其在與國外許多現場總線CAN-bus應用層協議的競爭中占據有利位置。隨著CAN-bus總線在國內行業應用日漸廣泛,以及工業控制領域中DCS和FCS的互相融合,iCAN系統一定會成為分布式數據采集網絡的一種有效通信方式,具有良好的應用前景。






評論