一種機器人視覺系統模塊的設計

一、概述
本文引用地址:http://www.104case.com/article/85675.htm視覺技術是近幾十年來發展的一門新興技術。機器視覺可以代替人類的視覺從事檢驗、目標跟蹤、機器人導向等方面的工作,特別是在那些需要重復、迅速的從圖象中獲取精確信息的場合。盡管在目前硬件和軟件技術條件下,機器視覺功能還處于初級水平,但其潛在的應用價值引起了世界各國的高度重視,發達國家如美國、日本、德國、法國等都投入了大量的人力物力進行研究,近年來已經在機器視覺的某些方面獲得了突破性的進展,機器視覺在車輛安全技術、自動化技術等應用中也越來越顯示出其重要價值。本文根據最新的CMOS圖像采集芯片設計了一種通用的視覺系統模塊,經過編制不同的圖像處理、模式識別算法程序本模塊可以應用到足球機器人,無人車輛等各種場合。
二、設計原理
系統原理框圖如圖1所示。
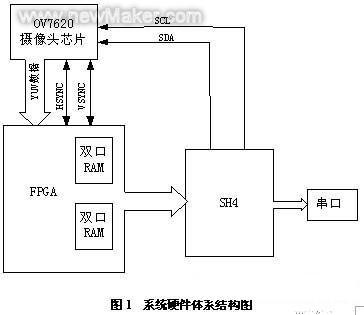
系統包含5個主要芯片:圖像采集芯片OV7620,高速微處理器SH4,大規模可編程陣列FPGA,和串口通訊控制芯片MAX232。FPGA內部編程設立兩個雙口RAM,產生圖像傳感器所需的點頻,行場同步等信號,以及控制雙口RAM的存儲時序。SH4負責對OV7620通過I2C進行配置,讀取雙口RAM的圖像數據,進行處理,并通過串口實現圖像資料的上傳或控制步進電機等其他設備。
三、圖像采集模塊
系統模塊以CMOS圖像傳感器OV7620為核心,還包括一個聚光鏡頭和其他一些輔助元器件比如27MHZ的晶振,電阻電容等。
COMS圖像傳感器是近幾年發展較快的新型圖像傳感器,由于采用了相同COMS技術,因此可以將像素陣列與外圍支持電路集成在同一塊芯片上,是一個完整的圖像系統(Camera on Chip)。本系統采用的是Ommnvision公司推出的一塊CMOS彩色圖像傳感器OV7620,分辨率為640x480。它能工作在逐行掃描方式下,也能工作在隔行掃描方式下。它不僅能輸出彩色圖像,也可用作黑白圖像傳感器。這塊芯片支持的圖像輸出格式有很多種:1)YCrCb4:2:2 16 bit/8 bit格式;2)ZV端口輸出格式;3)RGB原始數據16 bit/8 bit;4)CCIR601/CCIR656格式。其功能包括有對比度、亮度、飽和度、白平衡及自動曝光、同步信號位置及極性輸出,幀速率和輸出格式等都可以通過I2C 總線進行編程配置片內寄存器控制。
聚光鏡頭選用桑來斯公司生產的DSL103鏡頭。此鏡頭體積小,適合嵌入式視覺傳感器的應用場合。
四、FPGA接口模塊
FPGA采用Xilinx公司的xc2s100,這款芯片內部集成了10000個邏輯門。接口程序采用VHDL(Very High Speed Integrated Circuit Hardware Description Language)書寫。為了提高數據的傳輸速率,在xc2s100 內部分配了2個雙口RAM緩沖區,其大小為127KB,每個雙口RAM存儲1行的圖像數據。兩組雙口RAM進行奇偶行計數器進行切換。當一行存儲完畢后,立即向SH4傳生一個讀取該行數據的中斷的申請信號。FPGA內部結構如圖2所示。
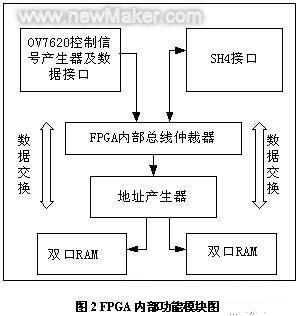
這里主要問題在于FPGA內部的雙口RAM讀寫操作共用同一數據總線和地址總線,當同時進行讀寫操作的時候就會產生時序問題導致寫入或讀出的數據錯誤。在這兩個過程中為了防止數據和地址總線沖突,在FPGA內部設計了一個中央總線仲裁器。根據公共數據傳輸的先后順序,中央仲裁器先接受圖像傳感器的總線請求,當圖像存儲到RAM之中后,中央仲裁器才響應單片機系統的讀信號請求。
這里給出雙口RAM的構造及讀寫控制程序:
Entity dual_port_ram is
Generic(d_width:integer:=2;
Mem_depth:integer:=8);
Port(clk:in STD_LOGIC;
CS:in STD_LOGIC;
We: in STD_LOGIC;
Indata: in STD_LOGIC_VECTOR(7 downto 0);
Outdata:out STD_LOGIC_VECTOR(7 downto 0);
Raddr,waddr:in STD_LOGIC_VECTOR(1 downto 0));
End dual_port_ram ;
Architecture data of dual_port_ram is
Type mem_type is array(3 downto 0) of
STD_LOGIC_VECTOR(7 downto 0);
Signal mem:mem_type;
Begin
Process(clk,we,waddr)
Begin
If(rising_edge(clk))then
If(we='1')then
Mem(conv_integer(waddr))<=indata;
End if;
End process;
Process(raddr,clk)
Begin
If(rising_edge(clk))then
If(CS='0')then
Outdata<=mem(conv_integer(raddr));
End if;
End if;
End process;
End data;
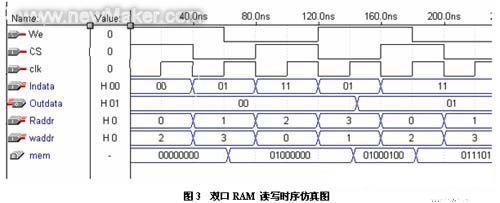
在MAX Plux II中的波形仿真圖如圖3所示:










評論