基于DSP和模糊控制的尋線行走機器人設計與實現

3 模糊控制策略
本文引用地址:http://www.104case.com/article/84266.htm機器人的設計思想是利用光電檢測傳感器檢測車體偏離指引線的大小來調整左右驅動步進電機的行進速度,使機器人沿指引線行進。這恰好符合模糊控制的思想[5]。
把前后光電檢測板上的光電檢測傳感器編號,將檢測到指引線的編號最大的光電檢測傳感器的編號作為車體偏離的距離,編號方法如表1。這樣,模糊控制器有兩個輸入:前后光電檢測板的輸入編號;模糊控制器有兩個輸出:左右步進電機驅動脈沖數。

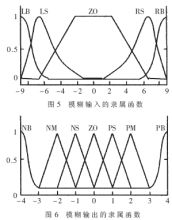
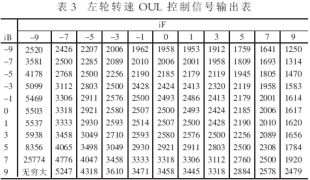
模糊控制器的輸入量的語言值模糊子集選取為:{LB,LS,ZO,RS,RB}。其中:LB=左大;LS=左小;ZO=中心;RS=右小;RB=右大。輸出量的語言值模糊子集選取為:{NB,NM,NS,ZO,PS,PM,PB}。其中:NB=負大;NM=負中;NS=負小;ZO=零;PS=正小;PM=正中;PB=正大。
根據隸屬函數的定義和選取規則,輸入變量前部位置iF 和后部位置iB的隸屬度選擇相同,如圖5所示。輸出變量左輪轉速OUL和右輪轉速OUR的隸屬度選擇相同,如圖6所示。
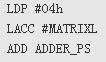
根據多次的實驗和修正,得到如表2的左輪轉速控制規則表(右輪的轉速控制規則表內容與左輪的轉速控制規則表對應,例如iF為RB、iB為LB時對應的OUL為NB,類似可得到右輪轉速控制規則表)。模糊推理采用Mamdani法。反模糊化采用重心法,最終得到如表3所示的左輪轉速控制信號輸出表(右輪轉速控制信號輸出表可用類似于右輪轉速控制規則表推導的方法得到)。在′F240存儲空間中以表格的形式存儲表3,根據輸入可得到相應輸出。

上述模糊信號的獲取通過EPM7128用VHDL語言編程實現,此部分的編程相對簡單,不再贅述。由于光電傳感器信號的改變可以實時反映在CPLD的輸出上,′F240只需定時讀取此信號并做相應從處理即可。假設前光電檢測板和后光電檢測板的信號分別保存在RE_CPLD字節的高半字節、低半字節中,若這兩個信號大于10則保持原數據不變,否則根據信號的大小計算此值在轉速控制信號輸出表中的偏移量:
其中#04h為保存轉速表的頁面,#MATRIXL為轉速表起始地址在頁面中的偏移量,ADDER_PS為查表值相對轉速表起始地址的偏移量。若將查表得到的值變化后保存為控制步進電機轉速的定時器的周期,則可以實時改變步進電機的轉速:

4 步進電機調速的實現
步進電機是純粹的數字控制電動機。它將電脈沖信號轉換成角位移,即給一個脈沖信號,電機轉一定角度。步進電機控制器的輸入端口有:VDD——電機電源正極;GND——電源地線;OPTO——控制信號的公共陽極;DIR——電機方向控制端;FREE——脫機輸入端;CP——脈沖輸入端(CP停止施加脈沖時,要保證CP為高電平,使內部光耦截止)。此處給DIR端加高電平,使機器人只向前行進,在程序中只需對CP端進行處理。
脈沖的產生通過控制I/O端口的電平變化實現。在設定了定時中斷的各種參數后,在定時器中斷處理程序中使一個標志字不停地加1:
在主程序中可以設定行走距離,定時中斷的時間間隔決定脈沖的頻率,也即決定步進電機的運動速度:
其中,數值2 000代表機器人行走的距離單位。利用模糊控制策略,改變控制兩個步進電機的定時器定時周期的長短以及行進的距離,可以實現機器人的尋線行進。
在總結近期參加的機器人比賽和電子設計競賽的基礎上,針對機器人尋線行走的普遍要求,提出了一種基于DSP+CPLD和模糊控制策略的機器人實現方法。利用該方法設計的機器人參加了多種不同的機器人比賽(如全國大學生機器人電視大賽、足球機器人比賽子項和電子設計競賽等),運行狀況良好,取得了較理想的成績,進而證實了此設計的有效性。
參考文獻
1 許 歡,唐競新.調制光尋線及其在自動行走機器人中的應用.清華大學學報(自然科學版),2002;42(1):115~117
2 萬永倫,丁杰雄.一種機器人尋線控制系統.電子科技大學學報,2003;32(1):47~50
3 TMS320C240X DSP Controllers CPU,System,and Instruction Set.Texas Instruments,1997
4 曹衛華,吳 敏,陳 鑫.基于DSP控制的足球機器人小車的設計與實現.機器人技術應用,2002;3:19~21
5 叢 爽.神經網絡、模糊系統及其在運動控制中的應用.合肥:中國科技大學出版社,2001











評論