基于ADCM絕對剩余距離原則的電梯速度控制

引言
本文引用地址:http://www.104case.com/article/81672.htm目前,國內大多數電梯都是采用以時間方式或者基于增量編碼器的相對距離方式來控制電梯運行的。這種傳統的速度控制方式不可避免的存在以相對極低爬行速度運行的過程,這就極大的影響了電梯運行的性能。為了提高電梯運行的舒適性和快速性,應該盡量消除電梯平層時的爬行停靠。本文介紹了基于絕對剩余距離原則的速度控制方法,該方法以正弦曲線作為理想速度曲線,消除了電梯制停時的爬行停靠,較好地解決了快速性與舒適性問題。
傳統的電梯速度控制方式
以時間為原則的電梯速度運行方式
以時間為原則的運行方式依據理想給定曲線利用多段速指令對變頻器控制。給定速度曲線是由存儲在E2PROM中的速度控制點和存儲在變頻器中的速度頻率值及加減速時間和S字特性時間構成。以時間為原則的運行方式,其實并不能算是一個閉環控制,它根據電梯的特點控制的輸入來確定電梯的運行階段, 并在確定運行階段之后對照存儲在E2PROM中的速度曲線以一種開環的方式運行。因此,它的運行時間是一個估計值,這導致了該運行方式的平層精度不高,舒適性也不好。而且,為了找到適當的控制點位置,電梯調試人員要做大量的工作。
基于旋轉編碼器的以相對距離為原則運行方式
這種方式的理想曲線是按照時間原則設計的,但電梯運行的速度曲線與位移曲線是相互對應的。由于電梯需要停靠的位置已經知道了,并且可以通過增量編碼器較為精確地測量出轎廂的位置,所以可以按照相對距離為原則對電梯進行較為精確的控制。相對以時間為原則的運行方式來說,該方式有了很大的改進,有較高的平層精度和較好的乘坐舒適性。
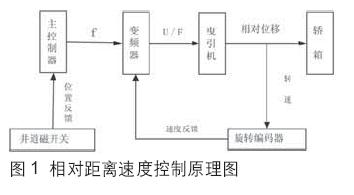
圖1為此種速度控制方式的原理圖。這種方式是通過安裝在電動機上的旋轉編碼器計算轉速間接獲得轎廂位置,由于實際必然存在的曳引輪槽與鋼絲繩之間的打滑,控制器極易失去轎廂當前的準確位置,因此它不得不通過井道磁開關給出電梯減速點位置,以此來不斷校正電梯轎廂的位置。所以此種方式的減速距離是固定的,由于旋轉編碼器獲得實時位置是有誤差的,造成了電梯在進入減速點時,系統計算的速度不盡相同,從而產生了平層時的爬行停靠。如果鋼絲繩打滑嚴重的話,還會形成嚴重的電梯事故。同時,由于干擾的存在,增量編碼器的丟失脈沖也可使電梯失去自身正確的位置。另一方面,從圖1 中可以了解,這種控制方式其實只是單閉環系統,它的絕對位置反饋只有減速、門區位置等幾個點,系統速度控制的實時性和精確性有待提高。
以絕對剩余距離為原則的電梯運行方式
ADCM絕對剩余距離的速度控制基本原理
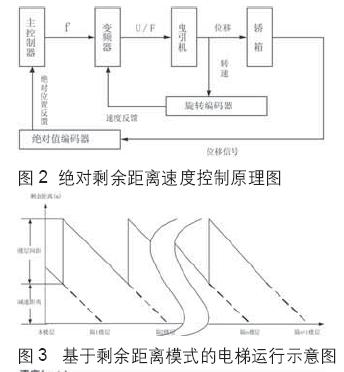
ADCM絕對剩余距離控制原則,是以絕對值編碼器作為電梯轎廂絕對位置反饋的控制方法。絕對位置就是轎廂的位置是連續實時測得的實際位置,絕對剩余距離是實時的電梯轎廂至欲平層位置的距離。這是一種較為理想的電梯的速度給定方式,它根據測得的絕對剩余距離實時計算電梯運行速度, 給變頻器發出速度控制指令,控制電梯的運行。圖2是絕對剩余距離ADCM絕對剩余距離控制原則,是以絕對值編碼器作為電梯轎廂絕對位置反饋的控制方法。絕對位置就是轎廂的位置是連續實時測得的實際位置,絕對剩余距離是實時的電梯轎廂至欲平層位置的距離。這是一種較為理想的電梯的速度給定方式,它根據測得的絕對剩余距離實時計算電梯運行速度, 給變頻器發出速度控制指令,控制電梯的運行。圖2是絕對剩余距離為原則的電梯系統原理圖。在電梯平層時,系統根據電梯的實時位置值計算出剩余距離,在足夠短的距離內給出減速信號,并給出相應的速度,達到減速點到平層位置速度的平滑過渡。系統依據絕對值編碼器直接獲得的轎廂位置反饋給電梯主控制器的同時,又把電梯速度反饋給變頻器,以便系統依據電梯的實時速度來調節系統的給出速度,提高電梯速度控制的實時性。通過以上措施,系統形成了電梯速度雙閉環控制,實現依據電梯的準確位置控制電梯的運行速度,消除電梯的制停停靠時的爬行停靠。它較好的解決了電梯平層停靠時的爬行停靠問題,同時實現了電梯的直接平層,提高了平層精度。
基于ADCM的電梯直接平層控制過程
* 加速段
微機控制電梯起動時,由增量編碼器產生的轎廂位置脈沖反饋至微機,微機內部的位移計數器對脈沖數累加,形成電梯已運行的距離S。在微機內的E2PROM中存儲了不同額定速度的2條電梯運行曲線,即多層運行和單層運行時的曲線。微處理器先判別電梯是否單層運行,選擇一條速度曲線,再以已運行的距離S作為E2PROM中運行的地址,查表得到相應的曲線值,再轉化成頻率值送給變頻器。
* 勻速段
在電梯的勻速段,微處理器始終發送恒定速度ν對應的頻率值給變頻器,并始終監控轎廂的位置,看是否達到減速點。
* 減速段
當轎廂運行到減速點時,微處理器以電梯轎廂距運行終點的脈沖數為基準,形成電梯距運行終點的距離L。微處理器以待運行的距離L作為E2PROM中運行曲線的地址,再查表得到相應的曲線值,再轉化成頻率值送給變頻器。
* 平層結束段
當L=0時,制動器及時動作抱閘吸合,以實現減速無爬行段準確停靠。電梯單層運行和多層運行時的控制模式
* 電梯單層運行控制模式
當控制板收到呼梯信號時,將收到的絕對值編碼器的位置值與下一樓層的絕對位置值相減,得到電梯轎廂與目標樓層的距離值。隨著電梯的運行,電梯轎廂與目標樓層的距離在不斷地接近。同時,主控制器也不斷地通過絕對值編碼器不斷地采樣電梯轎廂的實時位置,并計算出電梯運行所需的“剩余距離”值。
* 電梯多層運行控制模式
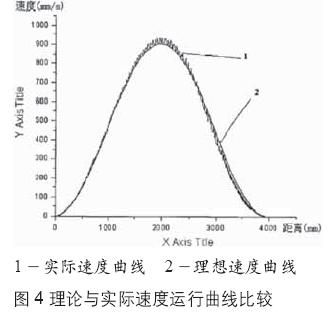
電梯運行多層時,“剩余距離”分段給出。首先,控制器給出到下一樓層的“剩余距離”,隨著電梯的運行,“剩余距離”的值不斷減小,如“剩余距離”值減至“減速距離”值時,還沒有該層的外召出現,則“剩余距離”為該層的“減速距離”與下一樓層的“樓層間距”之和:“剩余距離”在此時有一個階躍。但是“剩余距離”的遞減隨電梯的運行是連續的。如上圖3所示。
實驗仿真
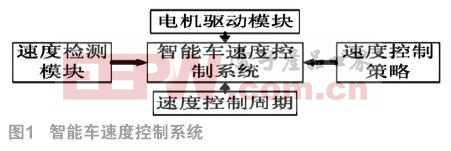
實驗設備包括:電梯主控制器-德國Infineon公司仿真器C167CS,THPLC-3型電梯模型,嵌入式絕對剩余距離速度控制模塊,絕對值編碼器一個,旋轉編碼器一個及其它設備。測得在實驗環境下電梯的速度運行曲線如圖4。由圖4可以看出,實際曲線與理想曲線較為吻合,改善了電梯的速度控制特性。
結語
本文在對現有電梯速度控制系統的研究分析的基礎上,引入絕對值編碼器作為新的位置反饋裝置,提出了一種全新的ADCM電梯速度控制系統構架。該構架采用雙閉環結構,提高了系統的穩定性,較好的滿足了舒適性與快速性要求。
參考文獻:
1. 李秧耕、何喬治、何峰峰,電梯基本原理及安裝維修全書,機械工業出版社
加速度計相關文章:加速度計原理 絕對值編碼器相關文章:絕對值編碼器原理

評論