基于STM32F303 ARM Cortex M4 及L63982 的無人機電子速度控制器方案

無人機技術非常有趣,因為它涉及最先進的設計原則: 平衡飛行時間,尺寸和重量,穩(wěn)定性,系統(tǒng)復雜性,邏輯,特殊功能和關鍵安全著陸等演習。
本文引用地址:http://www.104case.com/article/202303/445102.htm無人機制造商通常需要開發(fā)以下不同的子系統(tǒng)來生產可行的最終產品:
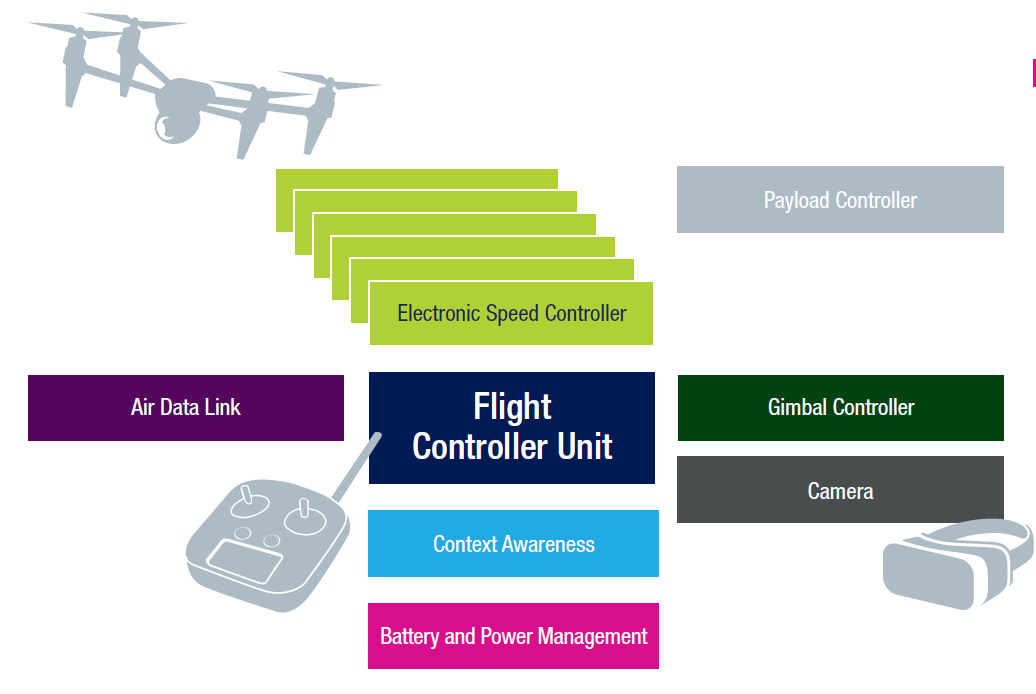
?飛行控制器單元(FCU),用于管理不同條件下的飛行,依賴其慣性測量單元(IMU)用于穩(wěn)定無人機懸停。在專業(yè)無人機中,F(xiàn)CU嵌入了GPS(全球定位系統(tǒng))形成自動駕駛系統(tǒng)。
?幾乎四個電子速度控制器(ESC)用于控制電動機的復雜性算法,允許高轉速,同時延長電池壽命。
?攝像機穩(wěn)定器,通過伺服電機旋轉和穩(wěn)定攝像機。
?Air Data Link,用于遠程控制和FCU命令的實時通信。
?高端無人機的電源管理階段,可有效分配電池能量于不同的電機。
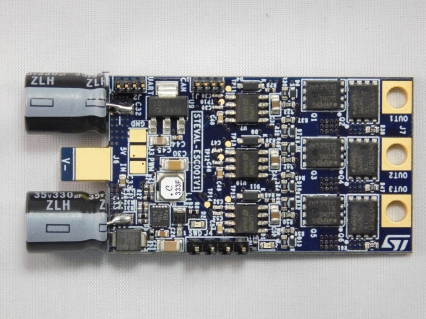
本電路板是用于無人機的電子速度控制器(ESC)(STEVAL-ESC001V1) 設??計適用于入門級商用無人機設計,并驅動任何三相無刷(或PMSM)電機運行6S LiPo電池組或任何等效直流電源,最多30A峰值電流。
由于完整的預配置固件包(STSW-ESC001V1),STEVAL-ESC001V1可讓您在幾分鐘內旋轉電機及其螺旋槳,實現(xiàn)無傳感器磁場定向控制算法,具有3相電流讀數(shù),速度控制和全主動制動。
參考設計板可以通過PWM信號接收飛行控制單元的命令;其他通信總線接口,如UART,CAN和I2C也可用。
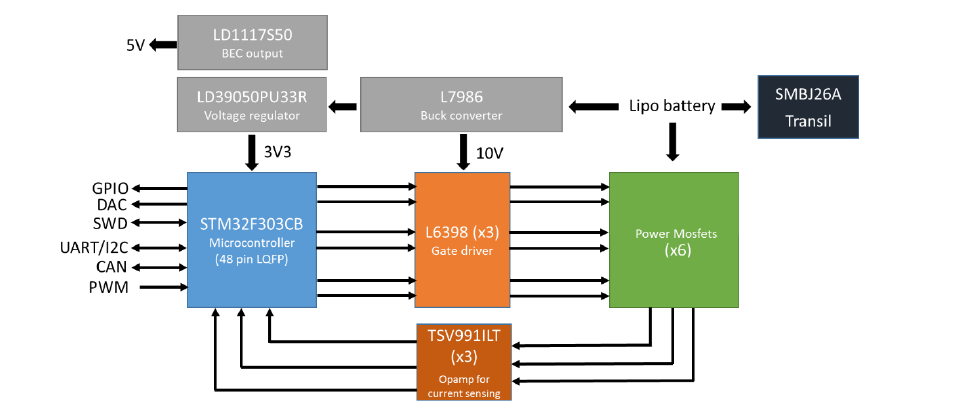
該參考嵌入了一個工作電壓為5 V的電池消除電路,一個用于溫度測量的NTC傳感器和用于過流/過壓保護(OCP / OVP)的電路。
緊湊的外形和電流能力使該參考設計適用于專業(yè)無人機等小型和輕型無人機上的電子速度控制器。
STSW-ESC001V1固件/軟件包以及STM32 PMSM FOC軟件開發(fā)套件 - MC庫可讓您通過STM32中嵌入的磁場定向控制參數(shù)來優(yōu)化您的電子速度控制器設計,并使用ST電機分析儀進行實驗,以快速檢索電機參數(shù)。 ST無傳感器FOC算法可確保更長的飛行時間和最佳的動態(tài)性能。
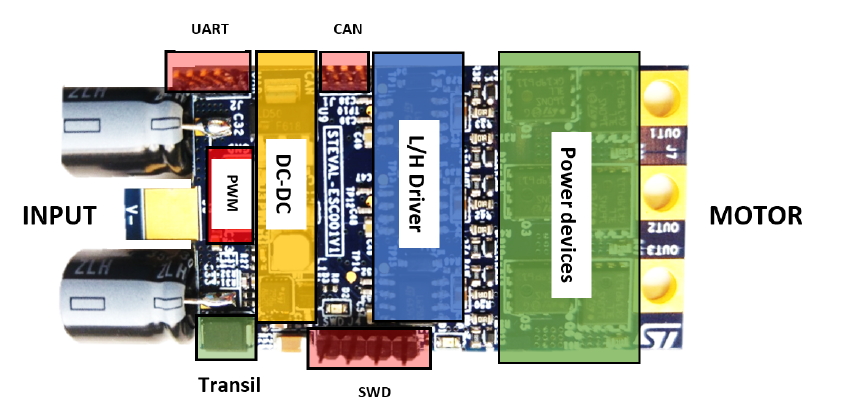
STEVAL-ESC001V1采用高效率,低Rdson STripFET F7功率MOSFET,高性能STM32F303CBT7微控制器和ARM?Cortex?-M4內核以及L6398驅動器設計。
延伸運用于遙控車輛的電機驅動:電動汽車,直升機,卡車等
任何三相BLDC或PMSM電機應用
硬建設計過程如下
反相器部分由L6398柵極驅動器,STL160N4F7和功率MOSFET組成。
L6398高壓高低側驅動器
L6398是采用BCD?“離線”技術制造的高壓設備。 它是單芯片的一半N溝道功率MOSFET或IGBT的橋式柵極驅動器。
高側(浮動)部分設計為可承受高達600 V的電壓軌。邏輯輸入為CMOS / TTL兼容低至3.3 V的電壓,可輕松連接微控制器/ DSP。
主要特色:
高壓軌,最高600 V
?dV / dt抗擾度在整個溫度范圍內為±50 V / ns
?驅動器電流能力:
– 290 mA源
– 430 mA灌電流
?1 nF負載時開關時間上升/下降75/35 ns
?3.3 V,5 V TTL / CMOS輸入比較器,具有滯回
?集成自舉二極管
?修復了320 ns的死區(qū)時間
?聯(lián)鎖功能
?緊湊而簡化的布局
?物料清單減少
?靈活,便捷的設計
STL160N4F7 160 A STripFET?F7功率MOSFET
該N溝道功率MOSFET使用STripFET?F7技術,具有增強的溝槽柵極結構,使通態(tài)電阻非常低,同時還減少了內部電容和柵極電荷,從而實現(xiàn)了更快的更有效的切換。
L7986,LD1117S50和LD39050PU33R這些器件為柵極驅動,BEC輸出和MCU電源提供適當?shù)碾妷骸?/p>
另外STSW-ESC001V1是STEVAL-ESC001V1的無傳感器FOC參考設計程式
用于STEVAL-ESC001V1板的此程式軟件包為無人機電子速度控制器(ESC)實施了無傳感器的磁場定向控制(FOC)。 它包括當電動機失速時(例如,螺旋槳堵塞)的自動重啟功能以及ESC撤防/撤防安全措施。
STSW-ESC001V1固件軟件包包括三個部分:STEVAL-ESC001V1的電動機控制固件,用于通過ST Motor Profiler操作STEVAL-ESC001V1參數(shù)的PC軟件插件以及項目文件。 適用于ST電機控制工作臺(STSW-STM32100)。
無傳感器FOC算法驅動電動機,固件通過PWM信號接受來自大多數(shù)常見飛行控制單元的命令; 開發(fā)人員還可以通過STEVAL-ESC001V1板上的相關連接器利用CAN,UART或I2C通信。
ST Motor Profiler的插件提供了實時的電動機參數(shù)信息,可幫助您快速使無人機飛行。
網頁如下
?場景應用圖

?產品實體圖
?展示板照片

?方案方塊圖
?無人機架構
?核心技術優(yōu)勢
基于磁場定向控制(FOC),STEVAL-ESC001V1中使用了更復雜的控制算法;它的特點:
?更好的扭矩控制
?負載快速變化時的電機電流調節(jié)
?減振
?主動制動功能
?更高的效率
?降噪
?實時監(jiān)控轉子轉速
?減速期間的能量回收
?方案規(guī)格
· 完整的電子速度控制器參考設計,實現(xiàn)無傳感器FOC算法
· 專為配備6S LiPo電池的無人機或具有等效DC電源的系統(tǒng)而設計
· 電子速度控制器準備好與任何標準飛行控制單元(FCU)通信:PWM或CAN
· 溫度過熱保護
· 標稱工作電壓范圍:3S-6S鋰電池直流電壓等級(11.1至22.2 V)
· 最大RMS輸出電流:20 A rms
· 輸出峰值電流:30 A.
· 去電池電路(BEC):外部接收器或FCU為5 V / 0.5 A.
· 提供完整的預配置程式包(STSW-ESC001V1)
· 由ST電機控制軟件SDK和ST電機分析儀支持
· 緊湊的PCB設計:29.1 x 58 mm
更多目標應用:
· 遙控車輛的電機驅動:電動汽車,直升機,卡車等
· 任何三相BLDC或PMSM電機應用
· 符合RoHS和WEEE標準






評論