SPWM波控制單相逆變器雙閉環PID調節器的Simulink建模與仿真

隨著電力行業的快速發展,逆變器的應用越來越廣泛,逆變器的好壞會直接影響整個系統的逆變性能和帶載能力。逆變器的控制目標是提高逆變器輸出電壓的穩態和動態性能,穩態性能主要是指輸出電壓的穩態精度和提高帶不平衡負載的能力;動態性能主要是指輸出電壓的THD(Total Hannonic Distortion)和負載突變時的動態響應水平。在這些指標中對輸出電壓的THD要求比較高,對于三相逆變器,一般要求阻性負載滿載時THD小于2%,非線性滿載(整流性負載)的THD小于5%.這些指標與逆變器的控制策略息息相關。文中主要介紹如何建立電壓雙環SPWM逆變器的數學模型,并采用電壓有效值外環和電壓瞬時值內環進行控制。針對UPS單模塊10 kVA單相電壓型SPWM逆變器進行建模仿真。通過仿真,驗證了控制思路的正確性以及存該控制策略下的逆變器所具有的魯棒性強,動態響應快,THD低等優點。并以仿真為先導,將其思想移植到具體開發中,達到預期效果。
本文引用地址:http://www.104case.com/article/270112.htm1 三電平逆變器單相控制模型的建立
帶LC濾波器的單相逆變器的主電路結構如圖1所示。圖1中L為輸出濾波電感,C為濾波電容,T1,T2,T3,T4分別是用來驅動IGBT的三電平的SPWM波,U0為輸出負載兩端的電壓。在建立控制系統的仿真模型時,需要采集負載兩端的電壓與實際要求的電樂值做比較,然后通過調節器可以得到所需要調節的值。在此仿真模型中,驅動波形采用的是三電平的SPWM波形,具體的產生原理在這不做詳細描述。在Matlah的Simlink庫中SPWM波的產生如圖2所示,這里調制比設為0.8.
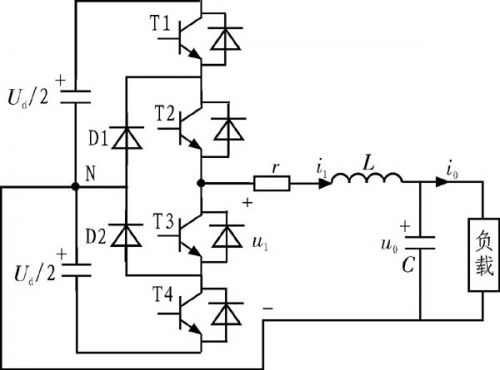
圖1 三電平逆變器單相主電路
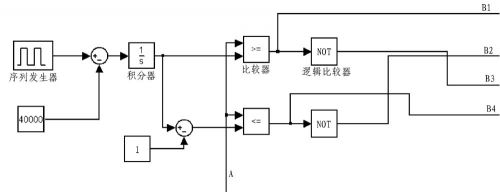
圖2 四相SPWM產生電路
在B1,B2,B3,B4端口用模擬示波器觀察其波形,結果如圖3所示。
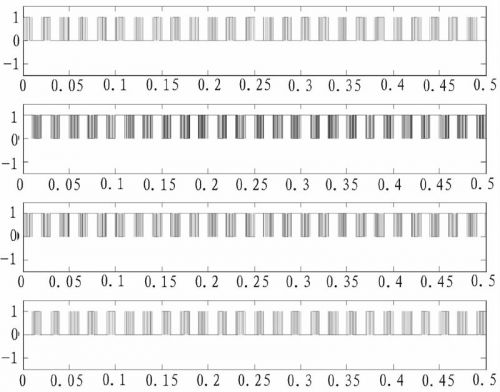
圖3 四相SPWM驅動波形
2 雙環控制的選取
在逆變控制系統中,采用輸出電壓有效值反饋的方法進行控制,這種方法通過將輸出電壓有效值與實際所要求的電壓有效值進行比較,誤差信號與正弦信號相乘的結果作為SPWM的調制信號。這種方法的輸出波形穩壓精度較高,穩定性好,但最大的缺陷在于逆變器的動態響應很差,完全依靠逆變器的自然特性,輸出電壓的波形質量無法控制。當負載為非線性負載時,由于逆變器輸出阻抗的影響,輸出電壓波形的THD比較大。為解決以上的缺陷,引入內環電壓瞬時環,當負載發生變化時,采樣回來的輸出電壓會在電壓瞬時環的控制下,保持良好的動態響應,控制框圖如圖4所示。
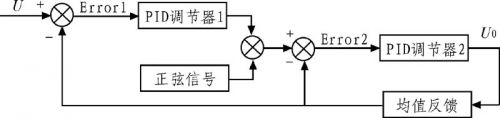
圖4 雙環控制框圖
在圖4中,輸入信號U為系統所要求的信號,U為系統輸出信號。本系統將PID調節器1設置為電壓瞬時值內環,將PID調節器2設置為電壓均值外環。

逆變器相關文章:逆變器原理
pid控制相關文章:pid控制原理
逆變器相關文章:逆變器工作原理
pid控制器相關文章:pid控制器原理


評論