基于雙軸加速度傳感器的新型角度測量系統設計

在現代控制系統中,角度測量裝置是非常關鍵的需要高精度的部件,其測量精度直接影響著整個系統的性能和精度。例如施工升降機上有角度測控機構來控制起降;火箭炮瞄準系統中都有大量的角度傳感器,實時檢測炮塔偏轉角度,以便對火箭炮瞄準進行調整。目前已有的利用的加速度傳感器實現高精度角度測量的研究,主要側重于單軸的角度測量。本文將重點討論利用雙軸加速傳感器ADXL202實現高精度角度測量的軟硬件方法。
本文引用地址:http://www.104case.com/article/267017.htm1角度測量儀系統硬件方案設計
本角度測量儀采用STM32F107作為數據處理的核心芯片。這是一款低功耗、高速度的32位處理器,擁有Cortex-M3內核。角度測量模塊使用的是高精度、低功耗的雙軸加速度傳感器ADXL202,能將加速度信號轉換成數字方波信號輸出,可直接與STM32F107連接,通過一定的算法即可計算出當前的傾斜角度。顯示模塊使用的是12864ZW型128×64的點陣液晶顯示器,圖1所示為角度測量儀硬件結構框圖。

圖1角度測量儀硬件結構框圖
2角度測量模塊
角度測量模塊使用的是ADI公司出品的低成本、低功耗、高精度的雙軸加速度傳感器ADXL202,其測量范圍為-2g~+2g,既能測量動態加速度,又能測量靜態加速度。它的工作電壓是3.0~5.25 V,工作電流低于0.6 mA,最高主頻可達到70 MHz,所以從功耗、靈敏度和精確度考慮,選擇ADXL202作為角度測量模塊的核心芯片。圖2是它的功能結構框圖。
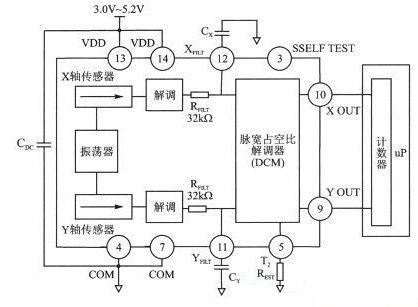
圖2 ADXL202的功能結構框圖
由圖2可知,ADXL202是基于單片集成電路的完善的雙軸加速度測量系統,對X、Y軸而言,輸出環路將加速度信號轉換為脈寬占空比的數字信號輸出,這些數字信號可直接傳輸給STM32F107,無需A/D轉換或其他附加的其他電路。
ADXL202由振蕩器、X和Y軸傳感器、相位解調器和脈寬占空比解調器組成,它的功能實現過程是,X、Y軸傳感器受到加速度力后輸出振幅變化的方波,輸出方波的振幅與加速度成正比。相位解調器能夠對輸出的方波信號進行修正并提取信息,然后判斷加速度方向。相位解調器的輸出會經過一個低通濾波電路,可以通過改變濾波電容的大小來設置輸出信號的帶寬。經過低通濾波的模擬信號進入DCM,被轉換為脈寬占空比信號輸出。
2.1角度測量模塊硬件電路設計
為保證ADXL202高精度穩定的工作,需要根據芯片技術文檔和實際使用情況,來配置信號周期、濾波電容(決定信號的帶寬)。
ADXL202的輸出信號是脈寬占空比調制信號,占空比T1/T2與被測加速度成正比。0g時,其輸出為50%占空比,靈敏度為每g所引起的脈寬占空比變化12.5%.查閱芯片的技術文檔,可以通過電阻RSET來設定DCM的周期:
T2=RSET/125 MΩ(1)
在X、Y方向上的加速度分量值可由下式計算:
A(g)=(T1/T2-0.5)/12.5% (2)
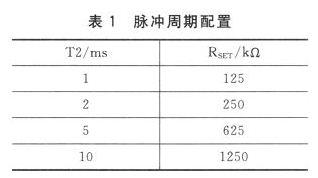
表1是芯片的技術文檔提供的RSET和T2配置表。我們選擇125 kΩ的RSET,將周期T2設定為1 ms.
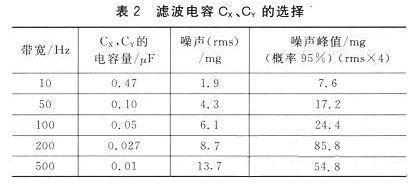
ADXL202通過XFILT、YFILT外接電容CX、CY來設定ADXL202的帶寬,這個帶寬決定了它的測量精度,同時電容CX、CY可以去混疊和濾波。為了使脈寬占空比的誤差最小,模擬帶寬應比脈寬占空比的頻率低1/10.對技術文檔提供的表2進行分析,并考慮設定T2為1 ms,脈沖占空比頻率為1 kHz,為滿足實際需要和DCM誤差最小的要求,選擇0.05μF的濾波電容,此時模擬帶寬為100 Hz.
引腳連接的規范:13、14是兩個電壓輸入引腳VDD,直接與5 V電源連接,同時連接退耦電容CDC,推薦使用0.1μF;4、7是兩個接地引腳COM,直接接地;2腳VTP保持開路,不與其他任何引腳相連;3腳ST是自檢輸入端,當接VDD時能檢查加速度計的功能,平時該引腳開路,也可與COM相連。引腳配置如圖3所示。
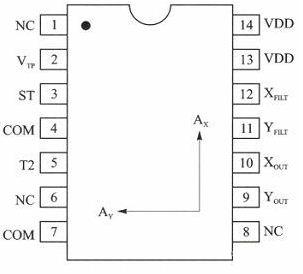
圖3 ADXL202引腳配置
根據芯片的引腳配置圖和以上的各類配置,可以設計角度檢測模塊的硬件電路,其電路原理如圖4所示,其脈沖輸出端直接與STM32F107的I/O口相連。
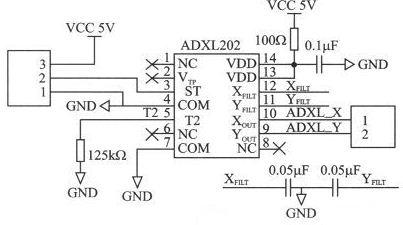
圖4角度采集原理圖

伺服電機相關文章:伺服電機工作原理
風速傳感器相關文章:風速傳感器原理 電流變送器相關文章:電流變送器原理 加速度計相關文章:加速度計原理









評論