一種有效的異質多傳感器異步量測融合算法

4 融合算法
本文引用地址:http://www.104case.com/article/266077.htm假設采用N個傳感器對目標進行觀測,Ti是第i個傳感器的采樣間隔,且在每個時間間隔[(k-1)T,kT](T為融合周期)內各傳感器共產生了Nk個量測,在該時間間隔內,某個傳感器可能產生一個或幾個量測,nik為傳感器i提供量測的數目,則有:
若某個傳感器j,在該時間間隔內沒有提供量測,那么在式(5)中nik=0,這些量測在該時間間隔內是任意分布的。
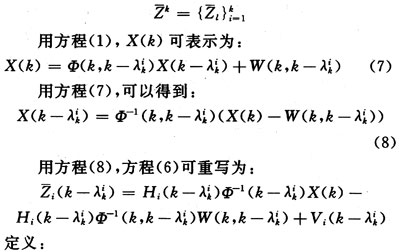
令λik(i=1,2,…,Nk)為獲得第i量測時間與KT之間的間隔,為方便標記,以下KT簡寫為K,如圖2所示,則量測i的測量方程可表示為:
則單個融合間隔內的量測集合可表示為:
直到k時刻為止各傳感器所有量測集合可表示為:

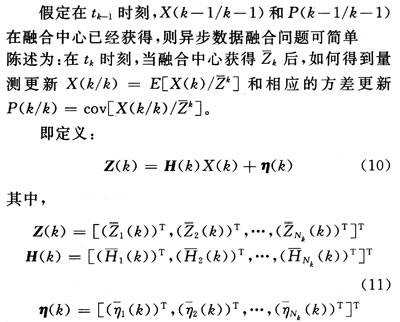
其中,Z(k),H(k),η(k)分別為擴維后的觀測矢量、觀測矩陣和測量噪聲矢量,且有E[η(k)]=0,偽量測噪聲之間的協方差矩陣為:

偽量測噪聲與系統(tǒng)噪聲之間的協方差矩陣為:


傳感器相關文章:傳感器工作原理







評論