DIY創意玩具:智能移動小車(輪式機器人)的軟硬件設計實現

一、項目概述
1.1 引言
智能移動機器人的誕生給人們的生活帶來了不小的變化,尤其是在工業生產中扮演了非常重要的角色。智能小車,也稱輪式機器人,它是一種集環境感知、決策、自動行駛等功能與一體的綜合系統,并是一種以汽車電子為背景,涵蓋了傳感、信息、通信、人工智能及自動化控制等相關技術,是典型的高新技術綜合體。
1.2 項目背景/選題動機。
智能移動機器人主要體現的就是對物體(障礙物)的感知能力和識別能力,本方案實現尋跡、避障、調速等功能。
二、需求分析
2.1 功能要求
智能移動小車,可以遙控小車左右前后行走,具備尋線和避障功能。
2.2 性能要求
壁障距離20cm范圍內。尋線線寬1cm-5cm。拐彎角度90度-270度。
三、方案設計
3.1 系統功能實現原理(除圖片外需有文字介紹)
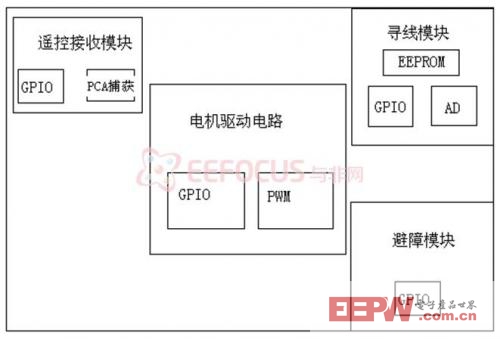
圖1 智能尋線避障小車控制電路資源分配
利用開發板,PSoC技術優勢,利用片上的AD資源,EEPROM,PWM等片內資源。
(1)尋跡部分:以光電傳感技術為基礎,結合CY8C單片機的AD資源,采樣待尋線路徑的背景顏色和路徑的顏色的反色光經光電轉換后的模擬電壓值,通過一定的算法,判斷路徑的位置,根據路徑的位置,確定小車的尋線軌跡。
(2)避障部分:以紅外線反射原理為基礎,通過CY8C單片機實現一定頻率的方波將紅外光進行調制,單片機接受調制后的紅外光,解碼后根據方波數確定在20cm左右的距離內有障礙物,從而確定小車的路徑規劃。
(3)小車速度的控制:采用CY8C單片機的PWM輸出功能,控制電機驅動電路,從而實現調速。

DIY機械鍵盤相關社區:機械鍵盤DIY






評論