基于藍牙與Android設備的控制系統設計

Android操作系統是Google基于開源的Linux操作系統開發的移動操作平臺,由操作系統、中間件、用戶界面和應用軟件組成,是專門為移動終端打造的開放和完整的移動操作系統。Android軟件平臺包含Java Application、Application Framework、Libraries、Runtime與LinuxOS等層。用戶可根據產品的不同需求對系統進行裁剪,從而適應多樣的產品需求,Android系統就如同積木一樣通過組合不同的軟硬件實現不同的應用產品。藍牙的出現為移動設備的互聯提供了一個方便快捷的選擇,Android設備和以單片機為處理器的控制器聯接使兩者的功能得到了互補。
1系統架構
基于藍牙與Android設備的控制系統由Android設備和下位機組成。Android設備(Android智能手機或Android平板)安裝有專門編制的軟件。下位機采用ATMEL公司高效的RISC內核的ATMEGA 8為核心,并集成藍牙串行模塊為通信信道。Android設備通過藍牙將數據發送至下位機,下位機根據接收到數據,完成相應的控制功能,并將處理結果上傳,實現實時監測、實時控制功能。下位機只負責數據的采集和實現控制功能,數據的存儲和處理在Android設備上實現。
2下位機設計
2.1控制模塊的設計
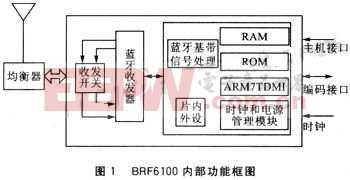
下位機由ATMEAG8、數字溫度傳感器、電機驅動電路等組成,其中CPU部分電路如圖1所示。下位機處理器串口連接藍牙模塊。數字溫度傳感器將當前溫度直接轉換成數字信號。藍牙模塊設置為從工作模式。
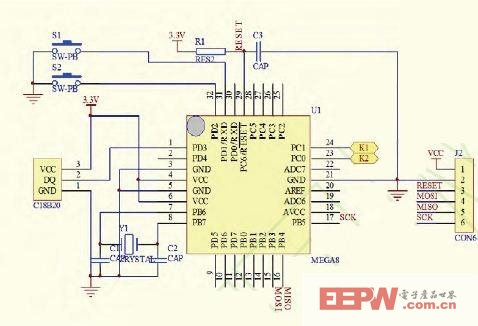
圖1 CPU電路原理圖
系統上電后藍牙模塊處于等待連接狀態,當Android設備第一次發出連接請求時需要輸入藍牙模塊的內置密碼,以后再連接時則不需要輸入密碼,只有密碼匹配成功才能后成功建立藍牙連接。藍牙模塊為Android設備和ATMEAG8的通信信道,實現Android設備和下位機的雙向數據連接。用戶通過Android設備向下位機發送命令,下位機接收到命令后,控制相應的執行模塊,實現設定的控制功能。K1和K2為低電平,電機兩端電壓為0V,電機停止;K1為高電平,K2為低電平電機兩端為5V,電機正向轉動;K1為低電平,K2為高電平電機兩端為-5V,電機反向轉動;K1和K2不能同時為高電平,電機驅動電路如圖2所示

圖2電機驅動電路原理圖
2.2藍牙模塊
藍牙模塊型號為IDS-BM4A,模塊有主/從兩種工作模式,通過PIO2電平來選擇模塊的工作,PIO2為高電平,模塊工作在從模式。模塊可以有兩種應用方式,方式1:從模塊上電即開始工作,用戶可以通過Android設備查找模塊,模塊設備名稱為“SPP”,查到設備后選擇連接,電腦端將提示輸入密碼,此時輸入“0000”,電腦將與模塊建立透明連接。方式2:需要兩個藍牙模塊,一個設置為主模式,一個設置為從模式,分別與兩個MCU連接,上電后主從模塊會自動配對連接,連接成功后主從模塊將建立透明數據傳輸,兩個設備之間可以直接互發數據。
工作狀態指示:模塊PIO0用來連接LED,指示當前工作方式。
主模式:
未連接,LED間隔1秒鐘快速閃爍2次;已連接,LED常亮。
從模式:
未連接,LED快速閃爍;已連接,LED常亮。
連接狀態指示:模塊PIO1為連接狀態指示,連接成功PIO1為高電平,連接斷開PIO1為低電平。
波特率設定表:








評論