汽車(chē)智能座艙軟件架構(gòu)

智能座艙域控制器目前承載信息娛樂(lè)系統(tǒng)、導(dǎo)航系統(tǒng)、駕駛員輔助系統(tǒng)、車(chē)輛監(jiān)控和控制、安全系統(tǒng)等各種功能。
本文引用地址:http://www.104case.com/article/202503/468506.htm這篇博客主要是對(duì)座艙域控制器基于QNX、Android Automtive OS軟件架構(gòu)做一個(gè)大致的介紹,如果想要更寬維度的了解,可以看第一篇參考文獻(xiàn),我覺(jué)得寫(xiě)得很好。
開(kāi)篇從汽車(chē)電子電器架構(gòu)的演變來(lái)講解為什么會(huì)出現(xiàn)智能座艙域控制器。最后我會(huì)描述和預(yù)測(cè)一下未來(lái)汽車(chē)域控制器軟件架構(gòu)會(huì)是怎么樣的,以及傳統(tǒng)軟件架構(gòu)和AI時(shí)代會(huì)有怎樣的技術(shù)融合。歡迎大家留言探討!
汽車(chē)電子電器架構(gòu)演變
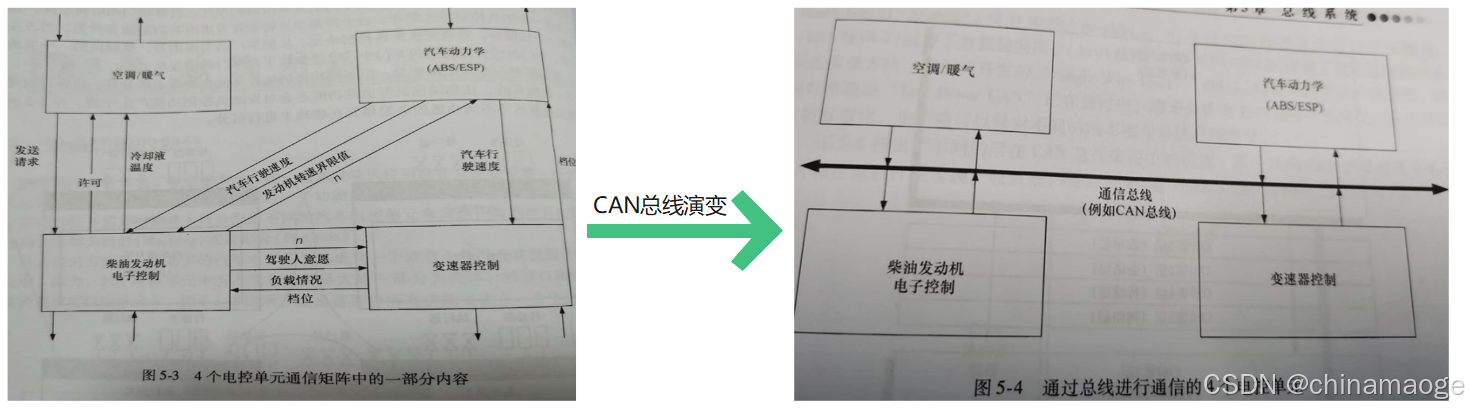
最早汽車(chē)中MCU都是相互相連接,互相傳遞信息,隨著MCU增多,各個(gè)MCU之間傳遞的信息增多,會(huì)導(dǎo)致系統(tǒng)特別的復(fù)雜,汽車(chē)電子電器架構(gòu)幾乎無(wú)法發(fā)展下去。
這個(gè)時(shí)候CAN通信問(wèn)世了,CAN通信確實(shí)是一個(gè)非常偉大的發(fā)明,是汽車(chē)電子電器架構(gòu)發(fā)展的轉(zhuǎn)折點(diǎn),核心就是CAN總線(xiàn)實(shí)現(xiàn)各個(gè)MCU之間的鏈接,各個(gè)MCU和CAN總線(xiàn)鏈接傳遞信息,不在各個(gè)ECU之間相互鏈接傳遞信息,這里也注定CAN總線(xiàn)是以總線(xiàn)信號(hào)為核心進(jìn)行處理傳輸。
電子電器架構(gòu)定義
汽車(chē)電子電氣架構(gòu),是指集合汽車(chē)的電子電氣系統(tǒng)原理設(shè)計(jì)、中央電器的設(shè)計(jì)、連接器的設(shè)計(jì)、電子電氣分配系統(tǒng)等一體的整車(chē)電子電器解決方案的概念。在2007年,德?tīng)柛J状翁岢?E/E 架構(gòu)的概念,對(duì)發(fā)動(dòng)機(jī)系統(tǒng)、車(chē)窗控制、車(chē)載娛樂(lè)系統(tǒng)等一切需要電力控制的軟硬件進(jìn)行系統(tǒng)設(shè)計(jì)和不斷優(yōu)化。
現(xiàn)代化E/E架構(gòu)
博世于2017年提出了新的電氣架構(gòu)演化圖,整車(chē)的架構(gòu)將從離散的分布式架構(gòu)逐步集成為幾個(gè)域控制器。這種集成式的架構(gòu)方案發(fā)展又來(lái)到一個(gè)轉(zhuǎn)折點(diǎn)的變化,整車(chē)電子電器架構(gòu)演進(jìn)趨勢(shì)如下圖所示:
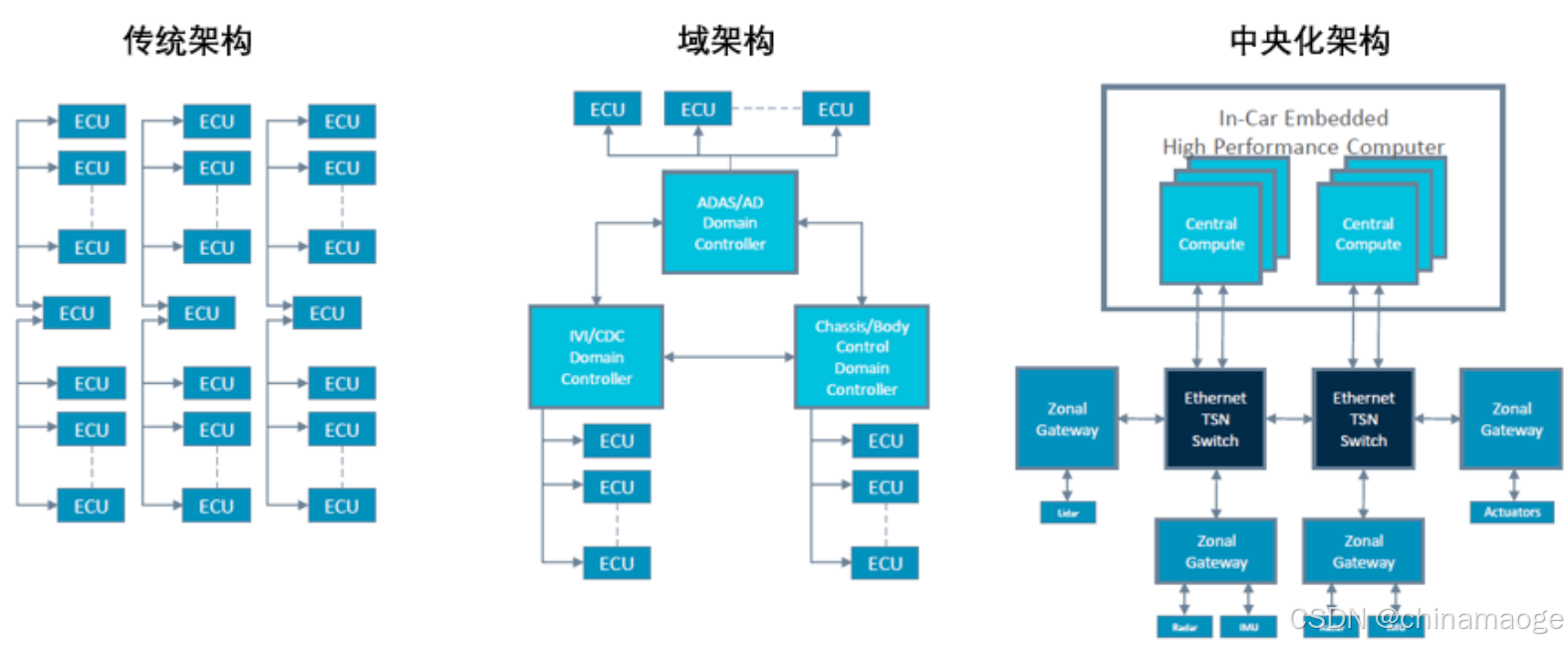
目前在24年底基本上主流主機(jī)廠都完成域控制器架構(gòu)的開(kāi)發(fā)與發(fā)布,在往中央化計(jì)算架構(gòu)發(fā)展。
域控制器架構(gòu)主要分為幾大域控制器:動(dòng)力域、底盤(pán)域、車(chē)身域、座艙域和自動(dòng)駕駛域。這篇博客主要介紹智能座艙域控制器軟件架構(gòu)。
但是由于中央化架構(gòu)馬上已經(jīng)要到來(lái)了,這里簡(jiǎn)單介紹主要的幾種形式和演進(jìn)趨勢(shì)。
中央化架構(gòu)
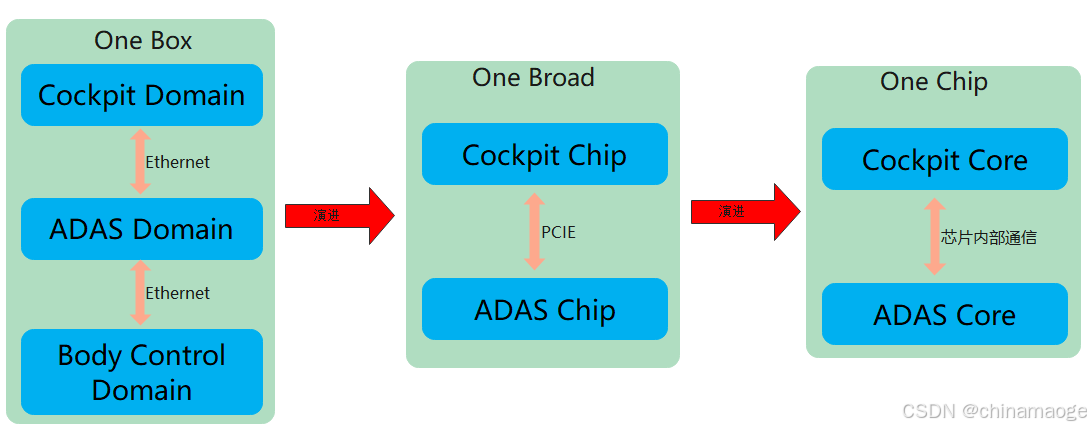
中體上分為三個(gè)階段:
第一階段:One Box,也就是每個(gè)域控制器單獨(dú)一塊電路板,板間通過(guò)Ethernet傳輸數(shù)據(jù),傳輸速率大概在125MB/s。
第二階段:One Broad,每個(gè)域控制芯片都在一塊板子上面,之間通過(guò)PCIE接口傳輸數(shù)據(jù),PCIE 4.0 x4速率可以達(dá)到8GB/s,速度比高速Ethernet提升64倍,效率大大提升。并且這個(gè)階段Body Control Domain應(yīng)該可以融合到Cockpit Domain,目前定義的BC Domain主要是外置功放和CDM(Control Dignose Center),最多在加上以S32G芯片為代表的中央網(wǎng)關(guān)。以后Cockpit Chip ADSP功能強(qiáng)大之后可以不要外置功放,并且CDM功能可以整合到Cockpit chip中,畢竟UDS(Unified Diagnostic Services)本人認(rèn)為是以座艙域控為控制中心。目前的中央計(jì)算中心要交換大量的數(shù)據(jù),很可能S32G中央網(wǎng)關(guān)芯片還是外掛,提供為Cockpit 和ADAS Chip訪(fǎng)問(wèn)聯(lián)網(wǎng)數(shù)據(jù)。
第三階段:One Chip,每個(gè)域控制器的功能做到整個(gè)SOC中作為一個(gè)IP core,之間通信方式為片內(nèi)通信,這個(gè)速度有多快呢?可以參考M4 芯片內(nèi)存帶寬可以達(dá)到120Gb/s,速率提升15倍。
目前主流主機(jī)廠One Box方案已經(jīng)上車(chē),主要都在研發(fā)One broad方案,或者直接過(guò)渡到One Chip方案。
在域融合的過(guò)程中最主要的就是數(shù)據(jù)共享、硬件共享。
在這里我可以舉個(gè)例子給大家思考:ADAS 感知數(shù)據(jù)產(chǎn)生是存在ADAS Domain,但是繪制顯示是在Cockpit Domain,這就需要把數(shù)據(jù)跨域發(fā)送。如果是分布式域控制器架構(gòu),一般的感知數(shù)據(jù)幀率是在10Hz左右,這個(gè)幀率人眼還是明顯發(fā)現(xiàn)有卡頓,受限與Ethernet帶寬,不可能把幀率做得太高。但是如果在One Broad架構(gòu)方案下,可以很輕松的做到30Hz以上,顯示數(shù)據(jù)會(huì)非常流暢。
但是如果是One Chip方案,這種數(shù)據(jù)場(chǎng)景完全不夠發(fā)揮這么高帶寬的價(jià)值,我認(rèn)為最高的價(jià)值應(yīng)該在硬件共享,使用Hpervisor 技術(shù)對(duì)CPU、GPU、DSP等硬件虛擬化,讓Cockpit and ADAS Domain都可以訪(fǎng)問(wèn)硬件資源。
目前大模型在座艙和自動(dòng)駕駛域都特別火,并且都在車(chē)端部署大模型階段,我認(rèn)為以后得趨勢(shì)一定是共享大模型域資源,架構(gòu)圖如下:
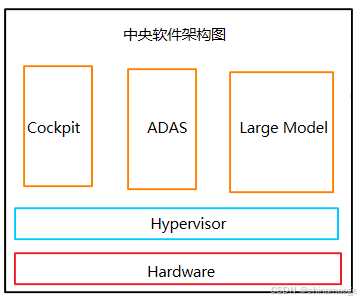
大模型域獨(dú)立于其他兩個(gè)域,并且可以讓Large Model 通過(guò)Hypervisor給Cockpit和ADAS Domain提供AI能力,給座艙提供語(yǔ)音大模型,給ADAS Domain提供End To End Large Model能力。
這樣可以更好的利用One Chip高帶寬能力,讓所有軟件域共享數(shù)據(jù)和算力。
這里可以看到目前中間架構(gòu)下是沒(méi)有底盤(pán)域和動(dòng)力域控制器的,因?yàn)檫@兩個(gè)域控制器技術(shù)相對(duì)都比較封閉。特別是底盤(pán)域,目前都是使用Bosch EMB為代表的One box系統(tǒng),這套系統(tǒng)的算法和控制單元Bosch都是沒(méi)有開(kāi)放出來(lái)的,也是統(tǒng)一一個(gè)模組來(lái)賣(mài),所以目前這種技術(shù)方案是沒(méi)有辦法集成到中央控制中心。
智能座艙域
智能座艙域有兩大功能,其中一個(gè)是In Vehicle Information娛樂(lè)功能域,第二個(gè)是儀表顯示功能域。
最早這兩個(gè)功能模塊是兩顆芯片在同一塊電路板子,因?yàn)檫@兩個(gè)功能域所要求的功能完全不同。對(duì)于儀表顯示功能域最重要的點(diǎn)就是實(shí)時(shí)性、可靠性,所以對(duì)其特點(diǎn)就開(kāi)發(fā)對(duì)應(yīng)的實(shí)時(shí)操作系統(tǒng)。
娛樂(lè)功能域?qū)?shí)時(shí)性和可靠性并沒(méi)有高的要求,要求高主要是娛樂(lè)生態(tài)的豐富性,主流選用的都是Android Autotive OS,因?yàn)槟壳癆ndroid生態(tài)非常的豐富。
智能座艙軟件架構(gòu)
隨著芯片算力能力增強(qiáng),這兩個(gè)功能域融合為一顆芯片,但是這個(gè)功能域還是區(qū)分為兩個(gè)操作系統(tǒng),怎么把兩個(gè)OS跑在同一顆芯片上?這就需要Hypervisor Technology。
Hpervisor Architecture
使用Hypervisor技術(shù)對(duì)硬件虛擬化搭建起來(lái),主要有下面兩種軟件架構(gòu):
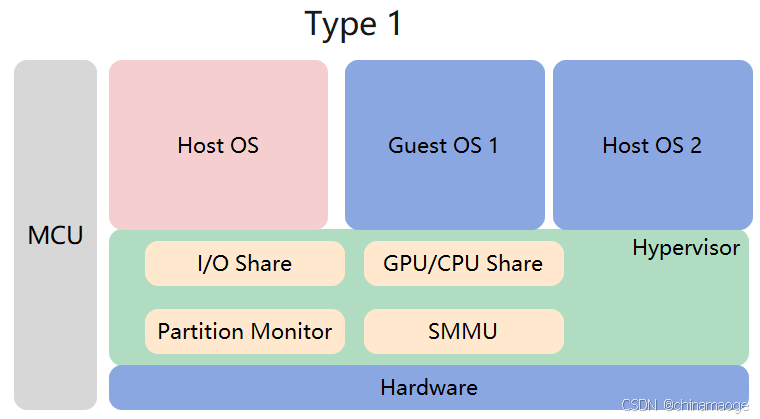
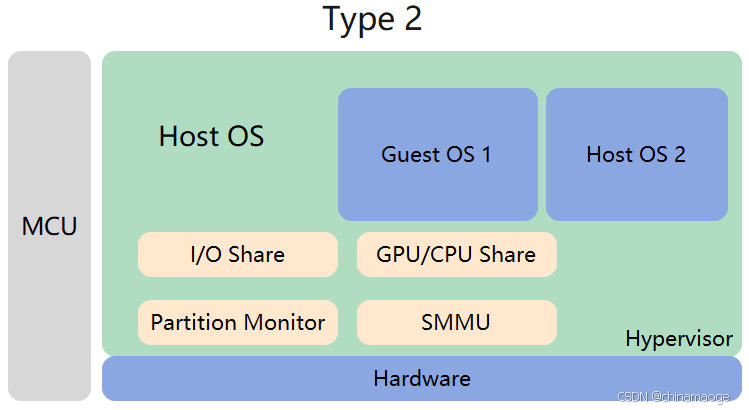
這兩種Hypervisor Type不同點(diǎn)就在于Type2中,Host OS 和 Hypervisor 是一個(gè)系統(tǒng),比如Qualcomm 方案中QNX使用GVM 進(jìn)程作為Hypervisor功能運(yùn)行Android Automotive OS。而Type1中Hypervisor 相對(duì)于Host OS是兩個(gè)獨(dú)立的系統(tǒng)。
目前域控制器方案中MCU都是單獨(dú)的芯片,所以單獨(dú)羅列出來(lái)。
系統(tǒng)軟件層級(jí)架構(gòu)
本人主要是基于Qualcomm 平臺(tái)軟件架構(gòu)開(kāi)發(fā),Qualcomm 平臺(tái)是以QNX為Host OS,并且其中包含Hypervisor 功能,Type 2軟件架構(gòu)方案。
Android Automotive OS為guest OS,
對(duì)Type 2軟件架構(gòu)分級(jí)進(jìn)一步詳細(xì),再加上MCU 軟件部分。
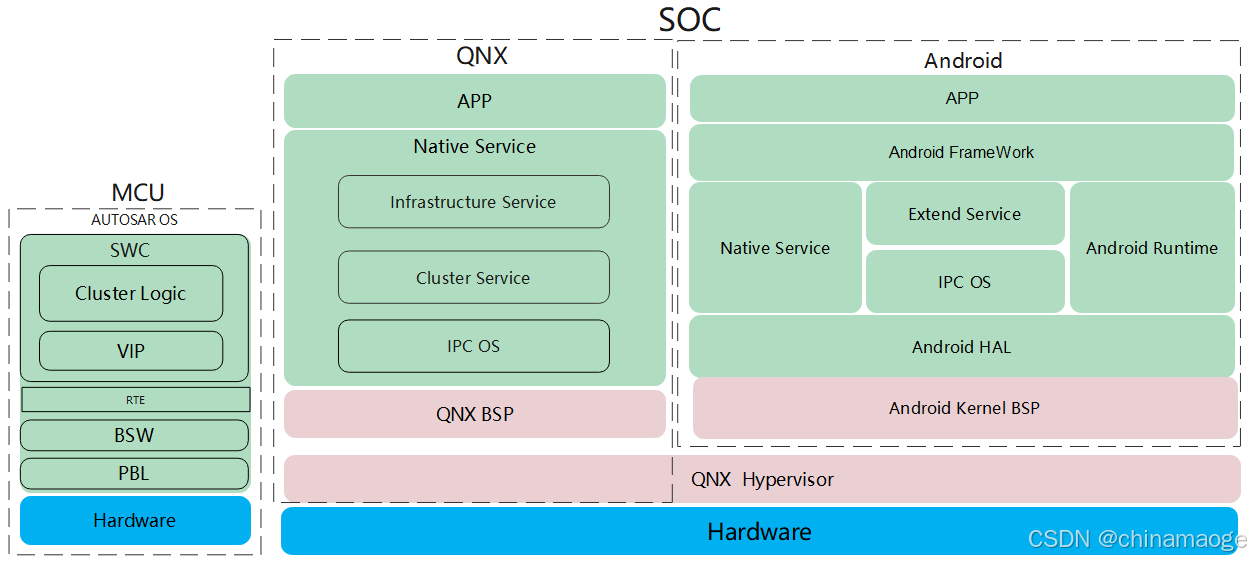
先從SOC部分開(kāi)始介紹,QNX啟動(dòng)GVM進(jìn)程加載Android,Android主要分為APP、Framework、Native service、HAL 、BSP layer。
Android特別解釋?zhuān)?/p>
Native Service:主要包含system分區(qū)除了framework 核心服務(wù)之外的一些外設(shè)服務(wù),比如MDNSD(Multicast DNS daemon)、logcat、ADBD、Iptable、Radio Service、Factory Reset。還有和Vendor廠商相關(guān)的Native Service,比如:Thermal Engine、CNSS(Compass Navigation Satellite System)-Daemon、Power Daemon 、IPACM(IP Access Control Manager)。
Extend Service:主要是Vendor 廠商定制化的system Service,比如Speech Service、OMS(Occupation Monitor Service)、Car Audio Service。
Android Runtime:Ueventd 、VOLD、LMKD、 Tombstone、Zygote、Service Manager,這都是標(biāo)準(zhǔn)組件。
IPC OS:這個(gè)都是主機(jī)廠為了SOA Service所使用的模塊,Android OS可以直接和外域OS通信。
QNX特別解釋?zhuān)?/p>
Infrastructure Service:在QNX系統(tǒng)中提供核心服務(wù)的模塊:收集QNX Log Service(一般會(huì)同時(shí)收集MCU log,然后通過(guò)UFS映射到Android 分區(qū),直接通過(guò)ADB就可以查看,非常方便,不是需要通過(guò)MCU廠商提供的軟件來(lái)導(dǎo)出MCU Log,很麻煩)、管理QNX power Service、接收Android系統(tǒng)界面信號(hào)vehicle Signal Service、接收整車(chē)車(chē)控信號(hào)的IPC Service、OMS、DMS、管理CSD屏幕和儀表屏幕的Display Service。
Cluster Service:主要是為儀控HMI APP提供基礎(chǔ)服務(wù)能力,比如:接收IPC Service發(fā)送過(guò)來(lái)的車(chē)控信號(hào),在儀表界面顯示的各種狀態(tài)燈提供處理分析邏輯;在多屏互動(dòng)過(guò)程中提取Android map的圖像數(shù)據(jù)和設(shè)置顯示圖層的基礎(chǔ)Service;接收ADAS傳輸過(guò)來(lái)的自動(dòng)駕駛感知數(shù)據(jù)Service。
APP:主要指HMI 模塊,這個(gè)layer一般都會(huì)使用Unity或者Unreal Engine提供的解決方案和產(chǎn)品,讓儀表屏幕能夠顯示各種圖像和數(shù)據(jù)。再包括一些數(shù)據(jù)消息緩存隊(duì)列
MCU軟件架構(gòu)主要是以AUTOSAR為標(biāo)準(zhǔn)進(jìn)行搭建的,主要是處理總線(xiàn)信號(hào)的功能(包括各種車(chē)控信號(hào)和整車(chē)電源信號(hào)),主機(jī)廠能夠開(kāi)發(fā)的應(yīng)該是SWC Layer,其他部分都是買(mǎi)的定制化AUTOSAR系統(tǒng)組件。
AUTOSAR(Automotive Open System Architecture)是一個(gè)全球性的汽車(chē)行業(yè)合作組織,同時(shí)也是一個(gè)開(kāi)放的標(biāo)準(zhǔn)化軟件架構(gòu),旨在為汽車(chē)電子系統(tǒng)提供一個(gè)標(biāo)準(zhǔn)化的開(kāi)發(fā)框架。框架就相當(dāng)于是把接口定義好,但是實(shí)現(xiàn)是需要自己寫(xiě)代碼的,所以主機(jī)廠的AUTOSAR都是買(mǎi)的供應(yīng)商的。
未來(lái)軟件架構(gòu)猜想
未來(lái)軟件架構(gòu)本人認(rèn)為,應(yīng)該主要是往第一種方向發(fā)展,Qualcomm和NVIDIA已經(jīng)在這么做了。
主要原因我認(rèn)為主要是:
第二種架構(gòu)中Host OS會(huì)融合Hypervisor功能,所以當(dāng)Host OS出現(xiàn)各種功能異常的情況,一定是會(huì)影響到Guest OS,兩個(gè)OS耦合性還是太高。
第一種架構(gòu)只是比第二種架構(gòu)在CPU loading角度多增加一個(gè)微內(nèi)核,一個(gè)微內(nèi)核的CPU loading只占一個(gè)大核loading的2%左右(主要是proc 進(jìn)程),負(fù)載是非常低的,付出這一點(diǎn)點(diǎn)代價(jià)換來(lái)兩個(gè)操作系統(tǒng)解耦、不相互影響是非常劃算。
還有一個(gè)發(fā)展方向我個(gè)人認(rèn)為會(huì)發(fā)生,就是把MCU芯片集成到SOC芯片中,作為一個(gè)獨(dú)立IP核。目前MCU單獨(dú)一顆芯片的核心原因是因?yàn)镾OC Chip需要在整車(chē)下電的工況斷電,而MCU是一直正常低功耗運(yùn)行,并且在車(chē)輛啟動(dòng)過(guò)程中喚醒SOC。還有一個(gè)功能就是處理總線(xiàn)信號(hào),接收車(chē)輛總線(xiàn)傳輸過(guò)來(lái)的信號(hào),然后把總線(xiàn)信號(hào)(模擬信號(hào))轉(zhuǎn)換之后轉(zhuǎn)發(fā)到SOC。
我本人認(rèn)為這兩個(gè)功能作為獨(dú)立IP都可以實(shí)現(xiàn),現(xiàn)在SOC可以對(duì)單獨(dú)一顆IP單獨(dú)供電,解決功耗問(wèn)題。也可以添加一個(gè)ADC IP處理數(shù)模轉(zhuǎn)換問(wèn)題,但是這樣高的集成度,也涉及到成本、研發(fā)投入、市場(chǎng)接受程度等各種問(wèn)題。而且目前MCU主要使用Infineon的芯片,Qualcomm自己不知道有沒(méi)有MCU Chip,所以讓Qualcomm或者NVIDIA去把MCU功能集成到SOC 作為一顆獨(dú)立IP也是需要技術(shù)挑戰(zhàn)的。
車(chē)控功能域總體架構(gòu)
座艙軟件架構(gòu)中車(chē)控功能主要是接收各種車(chē)控信號(hào),比如空調(diào)打開(kāi)和設(shè)置溫度、座椅調(diào)整方位、整車(chē)燈光使用等各種車(chē)控相關(guān)的信號(hào)。車(chē)控系統(tǒng)的軟件架構(gòu)我認(rèn)為最能代表出智能座艙域控軟件架構(gòu)的數(shù)據(jù)鏈路。
總體軟件架構(gòu)圖如下:
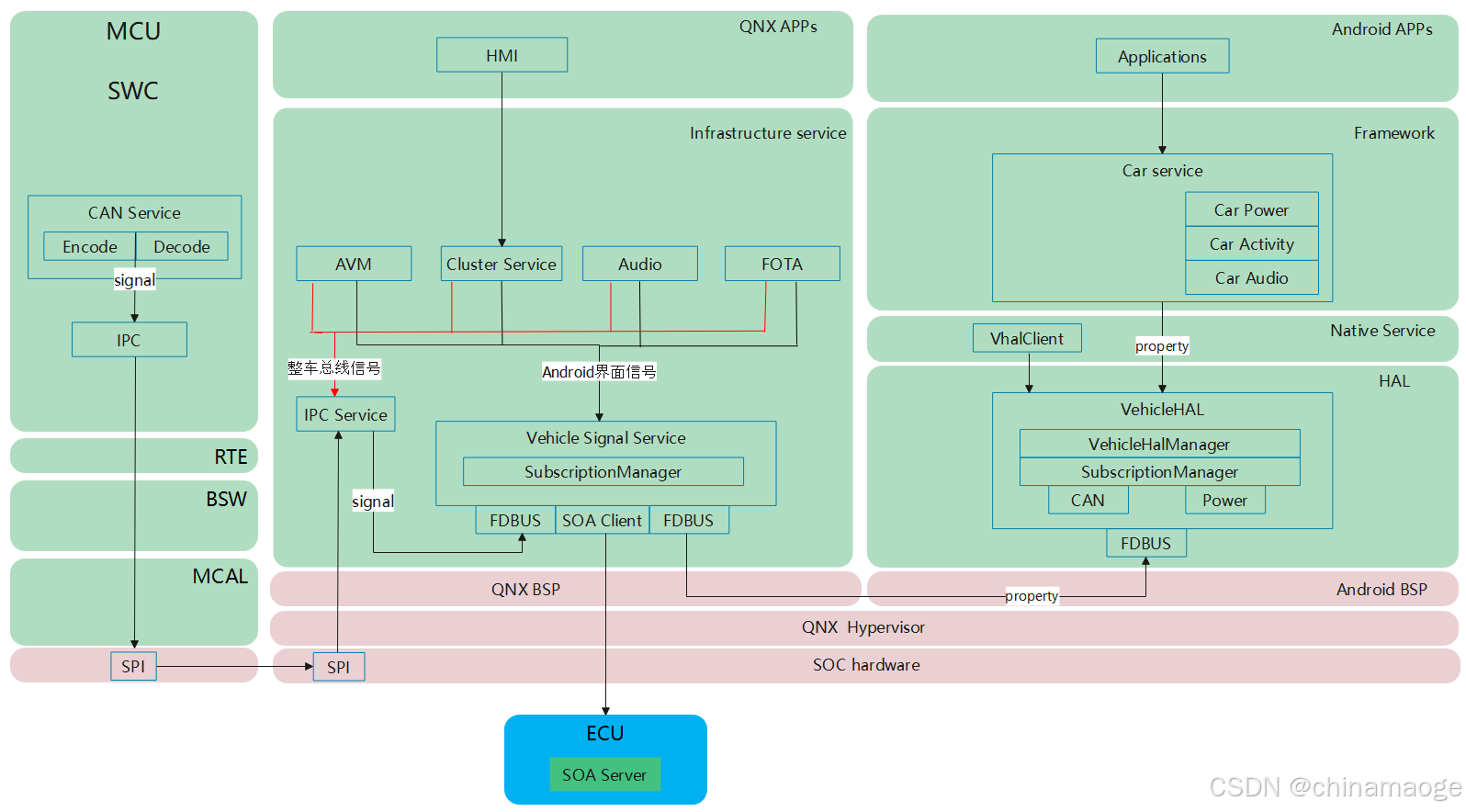
以打開(kāi)空調(diào)為例子介紹整個(gè)數(shù)據(jù)流程:
Air Condition APP會(huì)調(diào)用Car Service提供的API接口下發(fā)打開(kāi)空調(diào)的指令。這個(gè)過(guò)程擴(kuò)展說(shuō)一點(diǎn),一般的主機(jī)廠會(huì)在這里添加一個(gè)中轉(zhuǎn)進(jìn)程Service。因?yàn)檫@樣可以讓APP Layer和HAL高度解耦。在實(shí)際的環(huán)境中只有Google定義的Vehicle property信號(hào)是遠(yuǎn)遠(yuǎn)不夠的,需要主機(jī)廠定義自己的Vehicle property ID。如果各種原因?qū)е翽roperty ID發(fā)生改變,這個(gè)時(shí)候APP是需要修改ID Number,但是APP眾多各個(gè)都去適配代價(jià)很大。所以一般會(huì)做一個(gè)中轉(zhuǎn)信號(hào)的進(jìn)程Service,對(duì)Vehicle Property ID進(jìn)行封裝為標(biāo)準(zhǔn)帶有特定含義的API提供給APP使用,這個(gè)時(shí)候ID Change只需要中間Service修改就可以,大大減少工作量。
CarService再把Vehicle Property通過(guò)HIDL接口傳遞到Vehicle HAL(Android 14之間都是使用HIDL,14之后全部替換為AIDL)。VehicleHALManger對(duì)信號(hào)的轉(zhuǎn)發(fā)進(jìn)行權(quán)限校驗(yàn),SubscriptionManger對(duì)只有訂閱Vehicle Property信號(hào)服務(wù)的用戶(hù)端才會(huì)產(chǎn)生信號(hào)交互功能,這兩個(gè)功能組件都是Vehicle HAL中模塊。Vehicle HAL這個(gè)時(shí)候就需要跨域通信把信號(hào)發(fā)送到QNX,一般是選用SOME/IP或者FDBUS建立Client。
圖中CAN和POWER的意思代表:一般會(huì)把普通車(chē)控信號(hào)和POWER信號(hào)分別建立Client區(qū)分發(fā)送,因?yàn)槠胀ㄜ?chē)控信號(hào)和POWER信號(hào)在QNX是兩個(gè)Server來(lái)接收的。SOC POWER信號(hào)功能非常重要,會(huì)在QNX中開(kāi)發(fā)Power Manager Service模塊對(duì)POWER狀態(tài)機(jī)進(jìn)行管理,會(huì)把SOC各種Power電源狀態(tài)廣播到Cluster Layer、Infrastructure Layer、Android OS(通過(guò)Vehicle HAL)。
不知道大家這里是否有想到Vehicle HAL中的FDUBS 都是Client,卻Server都在QNX。因?yàn)楹诵姆?wù)的提供者都在QNX,通過(guò)QNX去管理Android狀態(tài)。所以?xún)蓚€(gè)系統(tǒng)高度耦合依賴(lài),一旦QNX狀態(tài)出現(xiàn)問(wèn)題,Android 對(duì)整個(gè)SOC狀態(tài)的感知將全部失效。
Vehicle Signal Service接收到請(qǐng)求信號(hào)之后,也會(huì)通過(guò)FDBUS 把信號(hào)傳遞給一個(gè)IPC Service模塊。Vehicle Signal Service作為中間件模塊會(huì)提供Android界面下發(fā)信號(hào)聯(lián)動(dòng)功能,如果空調(diào)功能打開(kāi)的同時(shí)需要在儀表界面顯示一個(gè)通知,就會(huì)通過(guò)FDBUS發(fā)送消息到Cluster APP繪制圖標(biāo);如果需要Audio播放聲音,也是需要把信號(hào)發(fā)送到Audio module使其通過(guò)揚(yáng)聲器播放出“打開(kāi)空調(diào)”的聲音。并且控制信號(hào)需要記憶化存儲(chǔ)也是此模塊完成,比如空調(diào)溫度設(shè)置到20°C,下次空調(diào)打開(kāi)就是上次設(shè)置的溫度,也是Vehicle Signal Service把信號(hào)值傳遞到Persistency Module寫(xiě)入到Persistency分區(qū),在SOC下次上電時(shí)從Persistency分區(qū)讀取恢復(fù)記憶。并且如果需要把Android傳遞過(guò)來(lái)的數(shù)據(jù)發(fā)送外域其他ECU,可以調(diào)用SOA Client發(fā)送信號(hào)值到其他SOA Server。
IPC Service模塊功能是把FDBUS數(shù)據(jù)序列化編碼為SPI格式化數(shù)據(jù),通過(guò)SPI網(wǎng)絡(luò)節(jié)點(diǎn)傳輸?shù)組CU CAN Service組件中。在QNX中的其他模塊:AVM、Cluster Service、Audio、FOTA需要接收車(chē)控總線(xiàn)信號(hào),都是從IPC Service模塊訂閱獲取。
MCU CAN Service接收到SPI傳輸過(guò)來(lái)的數(shù)據(jù),也先要進(jìn)行反序列化,再通過(guò)CAN / Flaxray / Ethernet等數(shù)據(jù)總線(xiàn)傳輸?shù)紺EM(Centrol Electronic Module),通過(guò)CEM再打開(kāi)空調(diào)壓縮機(jī)。
到這個(gè)流程結(jié)束時(shí)候之后,會(huì)通過(guò)以上鏈路對(duì)設(shè)置的數(shù)據(jù)進(jìn)行返回,讓鏈路中所有模塊對(duì)信號(hào)值進(jìn)行確認(rèn),只有CEM返回正確的信號(hào)值才能代表整個(gè)鏈路打開(kāi)空調(diào)的操作正確無(wú)誤。
Android 整車(chē)信號(hào)和整車(chē)總線(xiàn)信號(hào)主要的區(qū)別:一個(gè)是Android OS下發(fā)的信號(hào),一個(gè)是從整車(chē)總線(xiàn)獲取的信號(hào),信號(hào)方向和類(lèi)型不一樣。一個(gè)是以Vehicle Property為標(biāo)識(shí),一個(gè)以信號(hào)為標(biāo)識(shí)。
參考文章
4W字一文帶你看懂 智能座艙域控制 主流芯片及平臺(tái)架構(gòu)
智能座艙與芯片
汽車(chē)CEM模塊是什么
————————————————
版權(quán)聲明:本文為博主原創(chuàng)文章,遵循 CC 4.0 BY-SA 版權(quán)協(xié)議,轉(zhuǎn)載請(qǐng)附上原文出處鏈接和本聲明。
原文鏈接:https://blog.csdn.net/chinamaoge/article/details/143466179





評(píng)論