一款基于STM32的貼片機控制系統設計與實現

2.2 電源電路
本文引用地址:http://www.104case.com/article/247184.htm電源電路采用AMS1117—3.3作為電壓轉換芯片。AMS1117是一款正電壓輸出低壓差的三端線性穩壓電路,在輸出1 A電流時,輸入輸出的電壓差典型值為1.8 V,內部集成過熱保護和限流電路,確保芯片和電源系統的穩定性。
該電路輸入端與輸出端各接1個0.1μF的非極性獨石電容和1個220μF的極性電容。這兩組電容起到了穩壓濾波的作用。
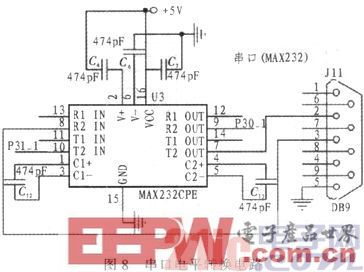
2.3 串口電平轉換電路
串行接口是嵌入式系統中較為常用的一種接口。本系統采用RS-232總線于上位機進行通信,采用MAX232芯片來完成RS-232串行接口的電平轉換。串口通信電路如圖8所示。
2.4 步進電機驅動電路
步進電機必須有驅動器和控制器才能正常工作。驅動器的作用是對控制脈沖進行環形分配、功率放大,使步進電機繞組按一定順序通電,控制電機轉動。本設計采用DM442數字式步進電機驅動器。該驅動器可以設置512內的任意細分以及額定電流內的任意電流值,能夠滿足大多數場合的應用需要。電路連線如圖9所示。
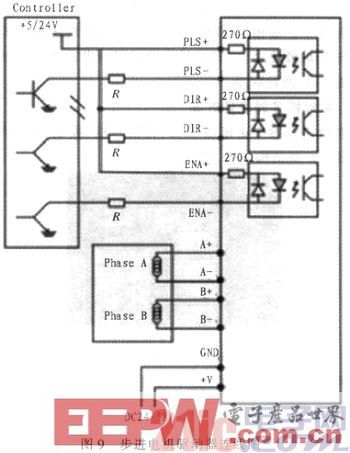
通過步進電機驅動器控制步進電機的方法較為簡單,僅需通過單片機IO口給出不同頻率的方波脈沖信號即可控制步進電機的速度,通過另一個IO口給出高低電平控制電機旋轉方向。本文所采用的步進電機步距角為1.8°,因此驅動器每接收200個脈沖信號,步進電機旋轉一周。
3 運動控制系統軟件設計
下位機控制程序由串口收發程序,限位開關檢測程序,舵機驅動程序、步進電機驅動等部分組成。下面將對舵機驅動和串口收發部分做詳細的介紹。
3.1 舵機驅動程序
根據1.1.2中的介紹,舵機用來控制吸筆和拖拽針的運動,在單片機的控制中常用PWM(Pulse Width Modulation)調制來驅動它。脈沖寬度調制(PWM)是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,其優越性在于驅動電子設備的簡單性和計算機接口的容易性。在舵機控制系統中,輸出的PWM信號通過功率器件將所需的電流和能量傳送到舵機線圈繞組中,來控制舵機的正反轉。
STM32的定時器除了TIM6和TIM7,其他的定時器都可以用來產生PWM輸出。其中高級定時器TIM1和TIM8可以同時產生多達7路的PWM輸出。而通用定時器也能同時產生多達4路的PWM輸出,這樣,STM32最多可以同時產生30路PWM輸出。由于只控制一個舵機,這里我們僅利用TIM3的CH2產生一路PWM輸出。具體步驟如下:
1)開啟TIM3時鐘,配置PA7為復用輸出。
2)設置TIM3的ARR和PSC,控制輸出PWM的周期。
3)設置TIM3_CH2的PWM模式。
4)使能TIM3的CH2輸出,使能TIM3。
5)修改TIM3_CCR2來控制占空比。
由于舵機所需的控制信號標準周期是20毫秒,最低不得少于15毫秒。中位脈沖寬度是1.5毫秒,脈沖寬度在加減1.5毫秒之間內變化。可控范圍一般都是0.5~2.5毫秒。即控制舵機運行至兩個機械極限位置的信號周期為0.5~2.5毫秒,對應占空比為2.5%-12.5%。本方案中舵機需保持在3個狀態,分別是左極限,右極限和中間位置。用于控制拖拽針下移,吸筆下移和復位。
因此,要控制舵機,首現需要一個頻率為50赫茲的PWM波,然后調節其占空比為2.5%-12.5%。PWM輸出頻率的計算公式為:
這里系統時鐘頻率為72000000赫茲,所需PWM頻率為50赫茲。為方便計算,同時保證自動重裝載值和預分頻系數均為整數,這里取自動重裝載值為1000。計算得預分頻系數為1440-1=1439。因此調用PWM初始化函數為:PWM_Init(1000,1439);
PWM輸出波形占空比計算公式為:
由此計算得到:
左極限位置時TIM3->CCR2=25,
右極限位置時TIM3->CCR2=125,
中間位置時TIM3->CCR2=75。
3.2 串口通信配置
STM32的串口資源相當豐富的,最多可提供5路串口(STM32F103RBT6只有3個串口),有分數波特率發生器、支持同步單線通信和半雙工單線通訊、支持LIN、支持調制解調器操作、智能卡協議和IrDA SIR ENDEC規范(僅串口3支持)、具有DMA等。
STM32的串口配置需要開啟串口時鐘,并設置相應IO口的模式,配置波特率、數據位長度、奇偶校驗位等信息。STM32的串口波特率計算公式如下:
上式中,fPCLKx是給串口的時鐘;USARTDIV是一個無符號定點數。
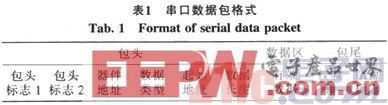
3.3 串口數據包格式設計
表1為串口與單片機通信的數據包格式,每幀有9個字節,開始六個字節是包頭標志、器件地址、數據類型、起始地址以及數據長度,其中數據類型有:讀數據指令r(0x72)、預設參數w(0x77)、運動指令m(0x6D)、請求重發指令c(0x63)、正常返回指令b(0x62)和放棄通信指q(0x71)。然后是10個字節的數據位,通常數據位為2個4字節的數據,為了避免出現數據對齊問題,在后面加入兩個值為0的字節。最后是兩
個字節的校驗位和結束標志位,采用CRC16進行校驗。












評論