一款基于STM32的貼片機控制系統設計與實現

摘要:本文采用STM32F103RBT6芯片設計并實現了一款小型化桌面型的貼片機。首先介紹了貼片機的結構及各個模塊的組成,分析了其中運動控制系統模塊的硬件組成、軟件設計方案,對核心電路部分、舵機的驅動程序以及串口通訊數據包的設計做了詳細的介紹。經過調試,該設計方案能夠較為準確和高效的完成自動貼片工作。
本文引用地址:http://www.104case.com/article/247184.htm貼片機又稱“表面貼裝系統”(Surface Mount System),是一種通過移動、吸取、安放動作把表貼元件精準放置在指定位置的一種自動化設備。在實際生產線中,先由點膠機對PCB板進行點膠操作,然后由貼片機進行貼裝操作,最后由回流焊機焊接,完成整個PCB板的焊接任務,是SMT流水線中不可或缺的一環。目前發達國家壟斷了貼片機的主要領域,我國的貼片機產業完全靠進口。而且在實際生產中,國際上的自動貼片機雖然效率與精度最高,但大都造價昂貴,功能單一,適用于大型企業。而手動貼片機造價低廉,但效率極低,精度取決于操作者得水平,且無法解放雙手。
本文以STM32F103RBT6為主控芯片,設計了一種適應于個體經營者、學校實驗以及科研制板等領域的自動貼片機,既能解放雙手,增加效率,又能不失精度,價格適中。
1 貼片機模塊設計方案
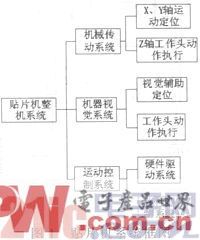
本文將貼片機模塊化的進行設計與編程,模塊化后的整機系統由3個部分組成:機械傳動系統、機器視覺系統和運動控制系統,如圖1所示。
1.1 貼片機機械傳動系統的設計方案
1.1.1 貼片機X軸Y軸設計方案
本方案采用X—Y軸兩軸聯動,Z軸獨立運動的設計方案。其中X-Y軸由步進電機通過同步帶傳動進行機械運動。具體實現結構如圖2所示。

如圖所示,Y軸步進電機固定于底座上,帶動同步帶輪旋轉,同步輪帶動同步帶做直線運動,光軸滑塊與同步帶相連。從而跟隨同步帶演光軸導軌做Y軸方向的的運動。X軸整體機構與Y軸相似,提供X軸方向上的直線運動。其整體固定與Y軸滑塊之上,當Y軸運動時同時帶動X軸運動。從而實現X—Y兩軸聯動。
1.1.2 貼片機Z軸設計方案
本設計方案中Z軸由舵機、光軸導軌、吸筆、拖拽針、攝像頭組成。其結構如圖3所示。

其中吸筆由空心軸步進電機制作而成,當步進電機旋轉時,帶動吸筆吸盤選擇,從而提供了貼片機旋轉軸的運動。旋轉吸筆用于改變元器件貼裝方向。拖拽針與吸筆固定在同一直線上,用于拖拽料盤,從而實現送料功能。拖拽針與吸筆分別固定在2組光軸導軌上,底部安裝有彈簧,用于拖拽針與吸筆復位。舵機控制壓桿左右旋轉,從而壓動吸筆與拖拽針進行向下運動,當壓桿處于中間態時,彈簧將吸筆與拖拽針
彈起,回到初始位置。攝像頭安裝在工作臺上方,用于俯視PCB板。
1.2 機器視覺系統設計方案
本方案采用兩臺CCD相機、環形LED光源及圖像處理設備組成。其中一臺CCD相機安裝在貼片機Z軸上。與貼裝頭一起運動,用于俯視PCB板,采集各定位點坐標信息,計算X—Y軸運動偏移量,輔助定位。另外一臺CCD相機固定在工作臺上,向上仰視。當貼裝頭吸取原件后,運動至相機上方,相機采集元器件圖像。計算旋轉角度偏移量及X—Y軸運動偏移量。環形LED光源提供相機采集圖像時的背光,提高成像質量。計算機用于處理采集到的圖像數據,分析計算后將控制指令傳送至運動控制系統。
1.3 運動控制系統設計方案
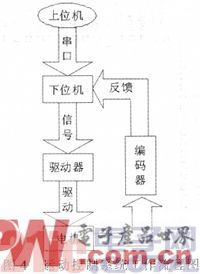
運動控制部分由軟件系統與硬件設備組成。其中軟件部分分為上位機及下位機。上位機即計算機。下位機采用STM32F103RBT6微控制器作為核心控制器。上位機與下位機由串口數據線連接。硬件設備由步進電機、步進電機驅動器、舵機、電磁閥等組成。
運動控制系統工作流程如圖4所示。
2 運動控制系統硬件設計
2.1 運動控制系統結構
貼片機控制系統模塊所完成的主要任務是,在上層控制器的控制下,對步進電機驅動器進行控制,使各軸能夠進行“受控運動”,實現運動控制系統所需求的各軸起制動、正反轉、調速和保護等功能。
控制系統的控制模式是以PC機為平臺、以微控制器為核心協調工作。通用PC機負責數控程序編輯、人機界面管理等功能;微控制器用來管理子程序以及負責機械本體的運動控制和邏輯控制,支持用戶的開發和擴展,并具有上、下兩級的開放性。
本設計方案采用STN32F103微控制器作為核心器件,協調3個步進電機驅動器控制步進電機的運行。同時獲取編碼器數據,限位開關狀態,并控制舵機、電磁閥等器件的運行。各器件連接圖如圖5所示。

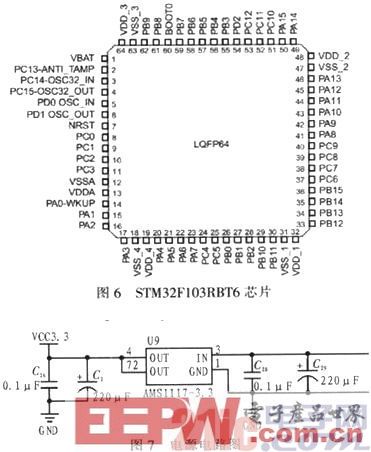
本設計方案所采用的主控芯片STM32F103RBT6是一款基于ARM Codex—M3內核的32位處理器,具有杰出的功耗控制與眾多外設。該芯片內置128K FLASH、20K SRAM、2個SPI、3個串口、1個USB、1個CAN、2個12位的ADC、RTC、51個可用IO口。其電路圖如圖6所示。












評論