基于CAN總線的重型汽車內輪差預警系統設計

4 系統軟件設計
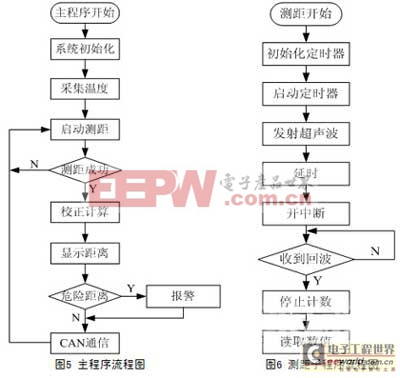
軟件采用模塊化設計,程序由主程序、測距子程序、CAN總線通信子程序等模塊組成。調試過程中對其中每個功能模塊和子程序逐一調試,在每個子程序都完成其指定的功能后,再進行整合完成最后的綜合調試。輪差預警系統的主程序流程圖、測距子程序流程圖分別如圖5、6所示。汽車轉彎時啟動預警系統,AT89C51先把P1.0置0,啟動超聲波傳感器發射超聲波,同時啟動內部定時器T0開始計時。我們采用的超聲波傳感器是收發一體的,在發送完16 個脈沖后超聲波傳感器還有余震,為了從返回信號識別消除超聲波傳感器的發送信號,要檢測返回信號必須在啟動發射信號后2.38ms才可以檢測。當超聲波信號碰到障礙物時信號立刻返回,微處理器不停的掃描INT0引腳,如果INT0接收的信號由低電平變為高電平,此時表明信號已經返回,微處理器進入中斷關閉定時器。再把定時器中的數據結合溫度傳感器送來的現場溫度經過校正換算,可以得出超聲波傳感器與障礙物之間的真實距離;然后顯示測距結果,若測距結果低于設定閥值則產生報警信號;最后把得到的距離數據實時的通過CAN總線網絡向汽車主控制器發送,這樣就可以實現預警系統與CAN網絡其他節點和上位機的通信和網絡控制功能。
5 結論
本文提出了一種應用于重型汽車的輪差預警系統,基于超聲脈沖測距原理進行測距,根據現場溫度對數據進行校正,并通過CAN總線將輪差預警系統與汽車的數字化平臺接軌,降低了環境因素的影響,提高了系統的檢測精度。根據障礙物到車體的距離遠近進行實時顯示,當該計算距離小于安全距離時,可以進行預警,提醒司機采取必要措施以避免發生碰撞事故。本系統結構簡單、可靠性高,可以經濟、有效地降低大型汽車輪差事故發生率,具有很好的應用前景。
參考文獻
[1] 黃世霖等. 汽車碰撞與安全[M]. 北京: 清華大學出版社, 2000.
[2] 何希才.傳感器及其應用電路[M] . 電子工業出版社, 2001.
[3] 鄔寬明. CAN總線原理和應用系統設計[M]. 北京: 北京航空航天大學出版社, 1996.
[4] 陽憲惠. 現場總線技術及應用[M]. 北京: 清華大學出版社, 1999.
[5] 王紹銧, 夏群生, 李建秋等. 汽車電子學[M]. 北京: 清華大學出版社, 2005.
[6] 黃世霖, 張金換, 王曉冬等. 汽車碰撞與安全[M]. 北京: 清華大學出版社, 2000.








評論