基于CAN總線的重型汽車內輪差預警系統設計

1 內輪差原理
內輪差是車輛轉彎時的前內輪的轉彎半徑與后內輪的轉彎半徑之差。由于內輪差的存在,車輛轉彎時,前、后車輪的運動軌跡不重合。內輪差的大小與轉動方向盤的幅度和車輛軸距的長短有關,方向盤轉動幅度越大即轉向角度越大,內輪差越大,反之越小;車輛的軸距越長,內輪差越大,反之則越小。重型汽車車身都比較長,尤其是車頭轉過去后,還有很長的車身沒有轉過來,極易形成大型車輛司機的“視覺盲區”,路人步入內輪范圍后,容易造成生命危險。如圖1中的陰影部分為內輪差的形成區域。
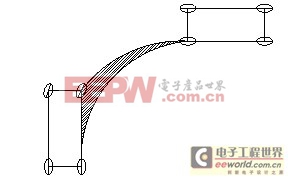
圖1 內輪差示意圖
2 超聲波預警原理
2.1超聲波測距原理
諧振頻率高于20KHZ的聲波被稱為超聲波。超聲波為直線傳播,頻率越高,則繞射能力越弱,反射能力越強。超聲波測距的方法多種多樣,如相位檢測法、聲波幅值檢測法和往返時間檢測法等。相位檢測法雖然精度高,但檢測范圍有限;聲波幅值檢測法易受反射波的影響。本文采用往返時間檢測法,其工作原理是:使超聲波發射探頭向介質發射超聲脈沖,聲波遇到被測物體后必有反射波作用于接收探頭。若已知介質中的聲速為V,發射脈沖時刻與第一個反射波到達時刻的時間差為 T,則探頭與被測物體距離S=VT/2,對距離值改變的測算可以實現所需的控制目的。超聲波的速度V與溫度相關,空氣中的聲速與溫度的關系可表示為:
(1) 
2.2 輪差檢測中超聲波傳感器的布置
汽車在行駛中即會向左側轉彎也會向右側轉彎,因此超聲波傳感器應該在車身的兩邊對稱安裝。本系統中一共需要安裝三對傳感器,一對安裝在前輪附近,為了提醒司機轉彎時車身后面是否會撞到轉彎內側的物體;第二對安裝在軸距中間附近,為了防止有物體在汽車轉彎時突然出現在轉彎內側;第三對安裝在后輪附件,為了及時提醒司機危險狀況。
3 系統硬件設計
本系統將單片機技術、超聲波測距技術與CAN總線通信技術等相結合,可檢測汽車在轉彎過程中汽車內側狀況。預警系統的三對測距傳感器獨立工作,通過CAN 總線經接口芯片PCA82C250驅動將數據傳輸到主控制器。測距采用SensComp 600傳感器和SensComp 6500超聲波距離模塊;單片機采用低成本的AT89C51主要功能為:1、用于控制測距傳感器并把測量數據實時通過CAN控制器SJA1000發送到 CAN總線上;2、通過溫度傳感器DS18B20傳送過來的溫度參數,修正超聲波在空氣中的傳播速度;在PCA82C250與SJA1000之間還增加了高速線性光耦6N137進行隔離,有效地防止汽車在惡劣工作環境下的瞬態干擾,確保數據傳輸的準確性。因為三對測距傳感器硬件系統完全相同,此次只用一個進行說明,系統硬件結構如圖2所示。
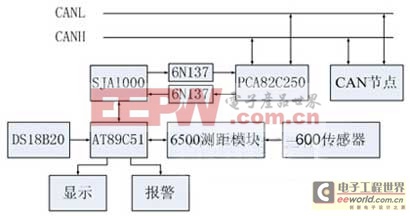
圖2 輪差預警系統硬件結構圖








評論