基于CAN總線的重型汽車內(nèi)輪差預警系統(tǒng)設計

3.1 CAN總線通信模塊
CAN總線協(xié)議遵循ISO的標準模型,分為數(shù)據(jù)鏈路層和物理層。這兩層通常由CAN控制器和收發(fā)器了實現(xiàn)的。CAN總線器件可大體分為兩種類型,其一種是帶片上CAN控制器,如87C196CA/CB、MC6837等;另一種的CAN控制器獨立需要和微處理器一起使用,如Philips SJA1000、Intel公司82526及MCP251。前者多用在許多特定情況下,使用集成器件方便用戶制作印制板,使得電路設計簡化、緊湊,效率提高;后者使用上比較靈活,它可以與多種類型的單片機、微型計算機的各類總線進行接口組合。在本系統(tǒng)中,結合前面選擇的微控制器綜合考慮,選Philips 半導體公司的SJAl000作為獨立CAN控制器。SJA1000的主要特性:擴展接收緩沖器(128字節(jié)FIFO);支持CAN 2.0B協(xié)議;同時支持11位和29位標識符;位通訊速率為1Mbits/s;增強CAN模式(PeliCAN);采用24MHz時鐘頻率;支持多種微處理器接口;可編程CAN輸出驅動配置;工作溫度范圍為-40℃~+125℃,足以適應各種惡劣環(huán)境。CAN總線驅動器選用Philips公司的 PCA820250,它具有高速性(最高速度可達1Mbps),能滿足自制動等實時性要求較高的控制需要;具有抗瞬間干擾保護總線的能力,具有降低射頻干擾的斜率控制。此外,它可以與110個節(jié)點相連,能夠防止電源與地之間發(fā)生短路,并且當某個節(jié)點掉電時不影響總線。
CAN總線通信模塊主要有AT89C5l微控制器、獨立CAN通信控制器SJAlO00和CAN總線驅動器PCA82C250組成。為了提高系統(tǒng)的抗干擾能力,設計在SJAl000和CAN總線驅動器PCA82C250之間增加了光電隔離器6N137。當微處理器AT89C51將測距結果數(shù)據(jù)通過P0口發(fā)送到CAN總線控制器SJAl000,由SJAl000將并行數(shù)據(jù)轉換為串行數(shù)據(jù)從端口TX0發(fā)出,經(jīng)過光電隔離器6N137后到達CAN總線驅動器PCA82C250,最后將數(shù)據(jù)發(fā)送到CAN總線上。相反,來自CAN總線的數(shù)據(jù)也可以經(jīng)過相應電路到達微處理器。這樣就可以實現(xiàn)超聲波測距傳感器與上位機的通信功能。
3.2 超聲波傳感器介紹
本系統(tǒng)采用單片機AT89C51來實現(xiàn)對SensComp 600系列超聲波傳感器和SensComp 6500超聲波測距模塊的控制。SensComp 600系列靜電換能器的頻率為50kHz;測量范圍為6英寸到35英尺(0.15米~10.7米)。配合SensComp的6500驅動電路時傳感器測量范圍能從2.5厘米到15.2米。AT89C51通過P1.0引腳控制超聲波的發(fā)送,然后單片機不停的檢測INT0引腳,當INT0引腳的電平由低電平變?yōu)楦唠娖綍r就認為超聲波已經(jīng)返回。計數(shù)器所計的數(shù)據(jù)就是超聲波所經(jīng)歷的時間,通過換算就可以得到傳感器與障礙物之間的距離,如圖3所示為超聲波測距的硬件示意圖。
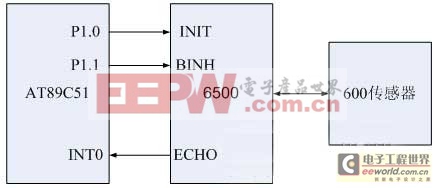
圖3 超聲波測距電路的硬件示意圖
3.3 溫度補償設計
由于溫度每改變10℃,聲速改變量為0.6m/s,因此溫度對測距的影響是相當大的。為了更精確的實現(xiàn)檢測功能,本設計使用了美國DALLAS半導體公司的單線溫度傳感器DS18B20。該傳感器能夠直接讀出被測溫度并且可根據(jù)實際要求通過簡單的編程實現(xiàn)9~12位的數(shù)字值讀數(shù)方式,測溫范圍 -55℃~+125℃,精度達±0.5℃,現(xiàn)場溫度直接以“一線總線”的數(shù)字方式傳輸,大大提高了系統(tǒng)的抗干擾性,整個產(chǎn)品體積小、價格低、使用靈活,在測溫精度、轉換時間、傳輸距離、分辨率等方面都能夠滿足系統(tǒng)的要求。如圖4為溫度傳感器與單片機的連接原理圖。
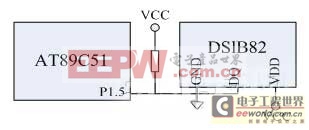
圖4 溫度校正部分原理圖








評論