C64x系列DSP/BIOS中設備驅動程序的設計

隨著新技術的不斷涌現和DSP實時系統的日趨復雜,不同類型的外部設備越來越多。為這些外部設備編寫驅動程序已經成為依賴操作系統管理硬件的內在要求。但是,由于內存管腳、響應時間和電源管理等條件的限制,為一個給定的DSP系統編寫設備驅動程序有時候會很困難。針對設備驅動程序開發者遇到的上述難題,TI公司為C64x系列[1]DSP的開發者提供了一種類/微型驅動模型(class/mini-driver model)[2]。該模型在功能上將設備驅動程序分為依賴硬件層和不依賴硬件層兩層,兩層之間使用通用接口。實踐結果表明,采用類/微型驅動模型進行設計后,應用軟件可以復用絕大部分相似設備的驅動程序,從而提高驅動程序的開發效率。
1 類/微型驅動模型簡介
在類/微型驅動模型中,類驅動通常用于完成多線程I/O請求的序列化功能和同步功能,同時對設備實例進行管理。在包括視頻系統I/O和異步I/O的典型實時系統中,只有少數的類驅動需要表示出外部設備的類型。
類驅動通過每個外部設備獨有的微型驅動對設備進行操作。微型驅動通過控制外設的寄存器、內存和中斷資源對外部設備實現控制。微型驅動程序必須將特定的外部設備有效地表示給類驅動。例如:視頻顯示設備存在一些不同的幀存,應用軟件會根據不同的I/O操作進行幀存的分配,此時微型驅動必須映射視頻顯存,使得類驅動可以對不連續的內存(分別存放RGB或YUV分量)設計特定的I/O請求。
類/微型驅動模型允許發送由開發者定義數據結構的I/O請求包給微型驅動來控制外部設備,此分層結構使設備驅動的復用能力得到加強,并且豐富了發送給微型驅動的I/O請求包的結構。
類/微型驅動模型結構如圖1所示。上層的應用程序不直接控制微型驅動,而是使用一個或一個以上的類驅動對其進行控制。每一個類驅動在應用程序代碼中表現為一個API[3]函數并且通過微型驅動的接口IOM與微型驅動進行通信。類驅動使用DSP/BIOS中的API函數實現諸如同步等的系統服務。
類驅動通過標準的微型驅動接口調用微型驅動控制硬件設備。到目前為止DSP/BIOS共定義了三種類驅動:流輸入輸出管理模塊(SIO)、管道管理模塊(PIP)和通用輸入輸出模塊(GIO)。在PIP和SIO類驅動中,調用的API函數已經存在于DSP/BIOS的PIP和SIO模塊中。這些API函數需將參數傳給相應的適配模塊(adapter),才能與微型驅動交換數據。而在GIO類驅動中,調用的API函數則直接與微型驅動通信(需在CCS2.2以上)。
每一個微型驅動都為類驅動和DSP/BIOS設備驅動管理提供了標準接口。微型驅動采用芯片支持庫(Chip Support Library)[4]管理外圍設備的寄存器、內存和中斷資源。
2 類驅動的編寫
SIO和PIP兩個接口模塊用于支持DSP和外設之間的數據交換。這兩種模塊都可以通過類驅動中的適配模塊和微型驅動的IOM連接進行數據傳輸。SIO的適配模塊稱為DIO,PIP的適配模塊稱為PIO。
GIO模塊[5]的傳輸模式是基于流輸入輸出模式的同步I/O模式,更適合文件系統I/O。在編寫類驅動時,可以直接調用GIO的讀寫API函數,這些函數的接口已經內置于微型驅動的IOM中。
2.1 SIO模塊和DIO模塊
DSP/BIOS中的SIO模塊為每個DSP/BIOS線程提供一個獨立的I/O機制,它支持動態創建。SIO模塊有自己的驅動模型,稱為DEV。DEV程序和微型驅動的編寫方法相似,都要實現函數表中的打開、關閉和緩存管理等函數,然而結構比較復雜。相比之下,DIO模塊可以簡化SIO模塊和IOM之間的連接,使得通信和同步變得更簡單。
DIO模塊必須實現下列基本功能函數:
(1)回調函數 在外設的通道實例創建結束時,如果微型驅動已經完成內存分配,那么適配模塊將通過回調函數通知微型驅動待調用函數的地址,同時回調函數也將通知適配模塊緩存已經建立,并最終通知上層應用程序。
(2)傳輸函數 傳輸函數將調用微型驅動中的mdSubmitChan函數。微型驅動中的mdSubmitChan函數將從適配模塊獲得一塊緩存,并將緩存中的新信息通過通道實例通知給中斷服務程序(ISR)。DIO模塊通過傳輸函數實現應用程序與微型驅動之間的通信。
2.2 PIP模塊和PIO模塊
DSP/BIOS中PIP模塊提供管理異步I/O的數據管道。每個管道對象都擁有一塊同樣大小的緩存,這些緩存分別為同樣數量的等長小塊。小塊的數量和長度在DSP/BIOS中設置。雖然小塊的長度是固定的,但應用程序可以把小于這個長度的數據放入緩存小塊中。一個管道有兩個結束狀態:寫完緩存和讀完緩存。通常,無論哪個結束狀態都會激活I/O設備。數據通知函數用來執行讀寫同步任務和通知PIP緩存填滿或清空。寫數據時,PIP_alloc函數用來獲得緩存,PIP_put函數用于將數據寫入緩存。寫完后,讀數據通知函數notifyReader將被調用。讀數據時,PIP_get函數用來接收緩存中的數據,PIP_free函數在數據不再被使用時將緩存清空。清空完后,寫數據通知函數notifyWriter將被調用。
PIO模塊通過PIP模塊從應用程序中獲得緩存,并將獲得的緩存提供給微型驅動使用。當微型驅動使用完緩存時,PIO模塊還可以將緩存交還給應用程序。
PIO模塊必須實現下列基本功能函數:
(1)主函數 當應用程序給設備分配緩存時,PIP的緩存管理調用rxPrime和txPrime函數。這兩個函數調用DSP/BIOS的API函數獲得緩存并提供給微型驅動使用。主函數負責給適配模塊和應用程序的緩存分配發送起始信號。
(2)回調函數 當微型驅動已完成內存分配時,適配模塊通過回調函數rxCallback或txCallback通知微型驅動待調用函數的地址,同時回調函數也通知適配模塊緩存已經建立,并最終通知給上層應用程序。
(3)傳輸函數:傳輸函數將調用微型驅動中的mdSubmitChan函數。mdSubmitChan函數將從適配模塊中獲得一塊緩存,并將緩存的新信息通過通道實例通知給中斷服務程序(ISR)。PIO模塊通過傳輸函數實現應用程序與微型驅動之間的通信。
2.3 GIO模塊
GIO模塊在提供必要的同步讀/寫API函數及其擴展函數的同時,將代碼和使用數據緩存的大小盡量簡化。如圖2所示,應用程序可以調用GIO的API函數直接與微型驅動的IOM交換數據,這些API函數使得GIO成為了第三種類驅動。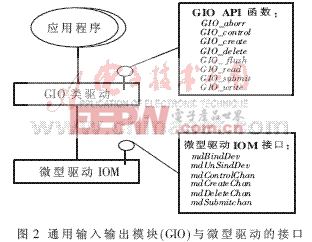
當調用GIO_create創建一個外部設備的通道實例時,GIO在通道實例中增加了狀態和I/O請求狀態結構、IOM數據包(IOM_Packets)及一個GIO數據對象。GIO創建的通道實例的數據結構如下:
typedef struct GIO_Obj {
IOM_Fxns *fxns; /* 函數表指針 */
Uns mode; /* 創建模式 */
Uns timeout; /* 超時時間 */
IOM_Packet syncPacket; /* 同步時使用的IOM_Packet */
QUE_Obj freeList; /* 異步I/O隊列 */
Ptr syncObj; /* 同步對象地址 */
Ptr mdChan; /* 通道實例地址 */
} GIO_Obj, *GIO_Handle;
函數表指針是應用程序和微型驅動函數表(fxns)的接口;創建模式包括:輸入(IOM_INPUT)、輸出(IOM_OUTPUT)和雙向(IOM_INOUT);IOM_Packet在類驅動和微型驅動間的異步操作時使用;同步對象地址指向特定通道的同步信號;通道實例地址指向微型驅動創建的通道實例。
3 微型驅動的設計和實現
類/微型驅動模型中的微型驅動直接控制外部設備。只要微型驅動創建了規定的函數,應用程序就可以方便地通過DIO適配模塊、PIO適配模塊或(和)GIO類驅動調用。這些規定的函數包括:通道綁定函數(mdBindDev)、通道創建/刪除函數(mdCreateChan/mdDeleteChan)、I/O請求發送函數(mdSubmitChan)、中斷服務函數(ISRs)和設備控制函數(mdControlChan)。這些規定的函數將放入微型驅動的函數接口表(IOM_Fxns)中的相應位置,供應用程序通過適配模塊或GIO類驅動調用。函數接口表的結構如下:
typedef struct IOM_Fxns
{
IOM_TmdBindDev mdBindDev;
IOM_TmdUnBindDev mdUnBindDev;
IOM_TmdControlChan mdControlChan;
IOM_TmdCreateChan mdCreateChan;
IOM_TmdDeleteChan mdDeleteChan;
IOM_TmdSubmitChan mdSubmitChan;
} IOM_Fxns;
3.1 綁定通道函數
DSP/BIOS設備初始化時將調用每個已注冊到微型驅動中的綁定函數(mdBindDev)。綁定函數一般要實現下列功能:根據配置的設備參數和可能存在的全局設備數據初始化外圍設備;掛入中斷服務函數(ISRs);獲得緩存、McBSPs、McASPs和DMA等資源。
如果微型驅動使用多個外部設備,則DSP/BIOS為每個外設調用綁定函數。設備參數devid用來區分設備。如果支持一個設備,則綁定函數必須檢查是否已經有設備綁定。
微型驅動如果使用靜態數據來減少實時處理的動態數據分配,可以使用輸入/輸出數據指針(devp)。輸入/輸出數據指針將傳給通道創建函數(mdCreateChan)。
3.2 通道創建/刪除函數
從應用的觀點出發,在應用程序和外部設備之間必須有一個邏輯交流通道用來交換數據。應用程序通過微型驅動創建一個或多個邏輯通道對象作為應用程序的邏輯通道。通道創建函數(mdCreateChan)根據需要創建通道對象并給通道對象設置初始值。通道刪除函數(mdDeleteChan)則刪除已創建好的通道對象。雖然每個微型驅動的通道對象數據結構都略有不同,但有些字段是必須的,如通道模式、等待I/O 包序列和回調函數。以下是一個常見的通道對象數據結構:
typedef struct ChanObj {
Bool inuse; /*如果為TRUE,則通道已打開*/
Int mode; /*通道模式*/
IOM_Packet *dataPacket; /*I/O 包*/
QUE_Obj pendList; /*等待I/O 包序列*/
Uns *bufptr; /*當前緩存指針*/
Uns bufcnt; /*未處理的緩存數目*/
IOM_TiomCallback cbFxn; /*回調函數*/
Ptr cbArg; /*回調函數參數地址*/
} ChanObj, *ChanHandle;
3.3 I/O請求發送函數
微型驅動中的I/O請求發送函數(mdSubmitChan)用來處理IOM_Packet包中的命令字段。根據不同命令字段,微型驅動將處理命令或返回錯誤信息(IOM_ENOTIMPL)。
微型驅動支持的命令字段有:IOM_READ、IOM_WRITE、IOM_ABORT和IOM_FLUSH。微型驅動創建的輸入通道由IOM_READ命令來執行輸入任務,創建的輸出通道則由IOM_WRITE命令來執行輸出任務。要放棄或者刷新已經發送的I/O請求,可以使用IOM_ABORT或IOM_FLUSH命令。當放棄時,I/O請求包隊列中的所有輸入輸出請求都將被放棄。當刷新時,所有的I/O輸出包順序執行,而所有的輸入I/O包都被放棄。
3.4 中斷服務函數
微型驅動的中斷功能就是去處理外部設備的觸發事件,例如周期性的中斷。中斷通常是表示外設采樣完數據或者處理完數據,也可以用于為DMA提供同步信號,微型驅動必須處理這些中斷。通常微型驅動中的中斷服務函數ISRs必須完成以下功能:出列IOM_Packet請求;設置下一次傳送或服務請求;調用類驅動的回調函數以保證和應用程序同步,并返回IOM_Packet。
3.5 設備控制函數
微型驅動支持的控制操作因不同的外部設備而異。IOM定義了一些通用的控制代碼供驅動程序調用。特定設備獨有的控制代碼必須自己編寫,其特征值必須大于128(IOM_CNTL_USER)。目前IOM支持的通用的控制代碼有:
IOM_CHAN_RESET:將創建的通道實例重新恢復到初始狀態。
IOM_CHAN_TIMEDOUT:當應用程序或類驅動超時時,此控制代碼將進行超時操作。例如,一個超時的IOM_Packet,如果沒執行回調函數,可能會被返回類驅動。
IOM_DEVICE_RESE:外部設備重新恢復到初始狀態,它將影響為這個外部設備創建的所有通道實例。
微型驅動支持的控制代碼和控制操作必須告訴使用微型驅動的應用程序開發者,特別要注明該代碼的針對對象(是針對通道實例還是針對設備實例)。例如:改變外設波特率的控制代碼,必須注明是針對某個通道或者所有通道的,否則容易給應用程序帶來錯誤。
4 類/微型驅動模型驅動應用實例——C64x系列DSP/BIOS中PCI設備的驅動
4.l 微型驅動的設計與編寫
(1)設計mdBindDev的部分程序代碼:
static Int mdBindDev(Ptr *devp, Int devid, Ptr devParams)
{
……
QUE_new(device.highPrioQue); /* 建立IOM包隊列 */
QUE_new(device.lowPrioQue);
……
hwiAttrs.ccMask = IRQ_CCMASK_NONE;
/*初始化PCI中斷 */
hwiAttrs.arg = NULL;
IRQ_map(IRQ_EVT_DSPINT, intrId);
HWI_dispatchPlug(intrId, (Fxn)isr, -1, hwiAttrs);
}
(2)設計mdCreateChan的部分程序代碼
static Int mdCreateChan(Ptr *chanp, Ptr devp,String name,Int mode,Ptr chanParams, IOM_Tiom Callback cbFxn, Ptr cbArg)
{
……
chan = MEM_alloc(0, sizeof(ChanObj), 0);
chan->queue = device.highPrioQue; /*通道初始化 */
……
if (device.openCount == 0) {
PCI_intEnable(PCI_EVT_PCIMASTER); /*PCI設備中斷初始化 */
……
IRQ_enable(IRQ_EVT_DSPINT);
}
*chanp = chan; /*返回創建通道 */
}
(3)設計mdSubmitChan的部分程序代碼
static Int mdSubmitChan(Ptr chanp, IOM_Packet *pPacket)
{
ChanHandle chan = (ChanHandle)chanp;/*掛載已創建通道 */
……
req=(C64XX_PCI_Request *)packet->addr;/*I/O請求包地址*/
req->reserved = chan;
……
/*處理讀寫請求包 */
if (packet->cmd == IOM_READ || packet->cmd ==IOM_WRITE) {
imask = HWI_disable();
QUE_enqueue(chan->queue, packet)
……
}
……/* 處理其它功能的請求包 */
removePackets(chan, packet->cmd);/*移除已處理的請求包 */
}
中斷服務函數(ISRs)和設備控制函數(mdControlChan)的結構與以上I/O請求發送函數(mdSubmitChan)的結構類似,本文不再作敘述。
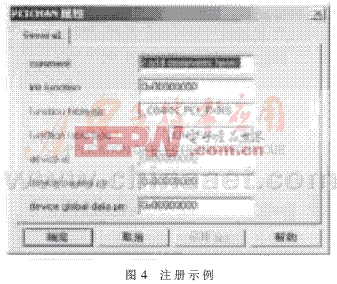
4.2 在DSP/BIOS中注冊微型驅動
打開DSP/BIOS配置工具,如圖3所示。右鍵點擊User-Defined Devices圖標,選擇插入選項,并重新命名為PCICHAN。右鍵點擊PCICHAN,選擇屬性選項,進行注冊,如圖4所示。
4.3 編寫類驅動
本例的類驅動使用通用輸入輸出模塊,首先右鍵點擊圖3中的GIO Manager,選擇啟動GIO。在應用程序中,GIO_create函數使用微型驅動PCICHAN來創建通道實例,通過調用GIO_submit函數完成應用程序對PCI設備的讀寫操作等。源代碼如下:
(1)創建通道
GIO_Handle pciChan;
C64XX_PCI_Attrs pciChanParam;
C64XX_PCI_Request pciChanRequest;
C64XX_PCI_DevParams pciChanDevParam;
GIO_AppCallback pciChanCallBack;
pciChan= GIO_create('/PCICHAN',IOM_INOUT, status, NULL, NULL);
(2)發送讀請求包
pciChanRequest.srcAddr = (Ptr)BitsBuffer;
pciChanRequest.dstAddr = (Ptr)m_DspControl.CstartAddr;
pciChanRequest.byteCnt = length+20;
pciChanRequest.options = PCI_WRITE;
pciChanReqSize = sizeof(pciChanRequest);
status = GIO_submit(pciChan,IOM_WRITE,pciChanRequest,pciChanReqSize,NULL);
通過上述三個步驟,PCI設備的DSP/BIOS驅動設計就基本上完成了。應用程序可以通過使用類驅動來復用PCI設備,這樣極大地提高了驅動的工作效率,對PCI外設的控制也大為簡化了。
參考文獻
1 TMS320C64x Technical Overview. Literature Number: SPRU395B.Texas Instruments Incorporated, January 2001
2 DSP/BIOS Driver Developer’s Guide. Literature Number: SPRU616. Texas Instruments Incorporated,November 2002
3 TMS320C6000 DSP/BIOS Application Programming Interface(API) Reference Guide. Literature Number: SPRU403E.Texas Instruments Incorporated,October 2002
4 TMS320C6000 Chip Support Library API Reference Guide.Literature Number: SPRU401E.Texas Instruments Incorporated,December 2002
5 TMS320C6000 Peripherals Reference Guide.Literature Number:SPRU190D. Texas Instruments Incorporated,February 2001











評論