TMS320C6711中心定位實時圖像處理系統

2.4 精確定中心
精確定中心是算法中最關鍵的部分,方法的好壞直接影響地心的精度。一般有霍夫變換法、面積積分和三點均值法等。精確定位采用面積積分法。根據微積分理論,對于一個封閉區域D,其重心坐標可用如下公式得到:
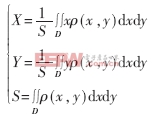
式中,x和y代表單元點的坐標,ρ(x,y)代表單元點的密度,D代表整個區域。
當ρ(x,y)=1時,區域的重心和形心重合,S表示區域的面積。為了能夠用計算機計算區域的中心位置,必須對上面的公式離散化。離散化后的公式為:
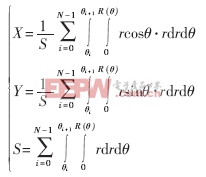
式中, R(θ)表示對應θi~θi+1范圍內的幅值變化規律。
3 實驗結果
把CCD拍攝到的圖像數據送入該系統處理,每處理完一幀圖像就會從串口輸出一個姿態角信息。表1是四幀圖像的處理結果。從表1可以看出算法的精度優于0.1的指標要求,算法處理時間約為0.49秒,滿足一秒處理一幀的實時要求。

由高性能數字信號處理器TMS320C6711B和FPGA組成的實時圖像處理系統,實現了圖像采集、實時數據處理及輸出。利用JTAG接口對系統進行在線調試,使系統具有很好的升級性和擴展性。采用DSP處理器,增強了系統的處理能力,提高了系統處理速度,保證了工作的實時性要求。采用貼片器件,既減小了PCB板的尺寸,又增強了系統的可靠性。實驗證明,中心定位算法通過對原始圖像濾波、判斷目標是否進入視場、邊緣檢測和精確定中心大大提高了地平儀的測量精度。
參考文獻
1 Philippe Malleth,Scott Chen.TMS320C6000 McBSP:UART.http://www.ti.com,2004
2 TMS320C6711/11B/11C Floating-Point Digital Signal Processors.http://www.ti.com,2005
3 TMS320C6000 DSP McBSP Reference Guide.http://www.ti.com,2005
4 TMS320C6000 EDMA Example Applications.http://www.ti.com,2004
5 何 斌,馬天予.Visual C++數字圖像處理(第二版).北京:人民郵電出版社,2002
6 傅德勝,壽益禾.圖形圖像處理學.南京:東南大學出版社,2002
7 周長發.Visual C++.net圖像處理編程.北京:電子工業出版社,2002











評論