基于QTE的ARMDSP嵌入式系統(tǒng)的直流電機監(jiān)控界面的設(shè)計與實現(xiàn)

摘要:以嵌入式微處理器ARMDSP主從控制模式下設(shè)計直流電機控制系統(tǒng),重點介紹基于QT/Embedded設(shè)計的直流電機監(jiān)控系統(tǒng)界面,包括串口通訊和電機控制。搭建基于嵌入式操作系統(tǒng)Linux的開發(fā)環(huán)境,采用C++語言進行應(yīng)用程序界面的開發(fā),根據(jù)基于串口的應(yīng)用層協(xié)議,實現(xiàn)主從控制器間的數(shù)據(jù)通信。并完成Linux操作系統(tǒng)的移植,通過觸摸屏實現(xiàn)人機交互。
關(guān)鍵詞:S3C2440;TMS320F2812:Linux;QT/Embedded;直流電機;圖形化用戶界面
0 引言
嵌入式技術(shù)在機器人控制領(lǐng)域應(yīng)用廣泛,它集中了機械工程、自動化控制以及人工智能等多門學科的最新科研成果,已經(jīng)成為當前科技研究和應(yīng)用的焦點與重心。而機器人控制系統(tǒng)需要解決的關(guān)鍵問題之一就是電機控制技術(shù)。本課題基于嵌入式系統(tǒng)處理器ARMDSP主從控制模式的硬件平臺,利用Linux操作系統(tǒng),對直流電機的控制進行研究,設(shè)計了基于QT的應(yīng)用程序開發(fā),以圖形的方式給用戶提供操作接口,實現(xiàn)對電機更加直觀的狀態(tài)顯示和靈活的控制。
1 控制系統(tǒng)的整體設(shè)計
本系統(tǒng)的主控制器由基于32位ARM。
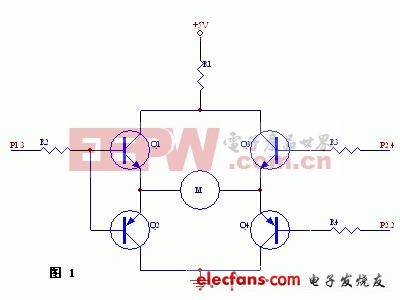
920T的RISC處理器Samsung S3C2440嵌入式開發(fā)板構(gòu)成,內(nèi)部運行嵌入式Linux操作系統(tǒng),主要負責系統(tǒng)的控制以及與從控制器DSP的通訊等任務(wù),主控制器通過串行通信接口(UART)實現(xiàn)與從控制器的數(shù)據(jù)通信,包括發(fā)送特定數(shù)據(jù)格式的控制指令和接收DSP控制器返回的傳感器數(shù)據(jù)。利用Linux操作系統(tǒng)搭建平臺并開發(fā)基于QT的圖形界面,通過觸摸屏實現(xiàn)人機接口,完成對電機和傳感器的控制和傳感器數(shù)據(jù)的顯示。從控制器采用32位定點控制器TMS320F2812,主要完成對電機的控制,以及反饋給主控制器ARM9當前的運動狀態(tài)。控制系統(tǒng)整體結(jié)構(gòu)設(shè)計框圖如圖1所示。

2 串行通信設(shè)計
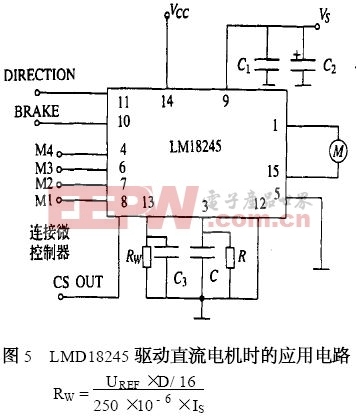
本系統(tǒng)中主控制器ARM9與從控制器TMS320F2812之間的通訊采用串行通信接口,即UART口。TMS320F2812的SCI模塊利用中斷進行控制,其接收和發(fā)送是雙緩沖的,二者可獨立地工作于全雙工模式。串口通過兩個可以復(fù)用和具有優(yōu)先級的I/O引腳SCITXD和SCIKXD分別用于發(fā)送和接收數(shù)據(jù),RS-232與DSP中的TTL電平之間需要配驅(qū)動和隔離電路可以組成一個簡單的通信接口。在ARM9和DSP之間采用了符合RS-232標準的驅(qū)動芯片MAX3232進行串行通信,MAX3232芯片功耗低、集成度高,具有兩個接收和發(fā)送通道。TMS320F2812串行接口電路如圖2所示。
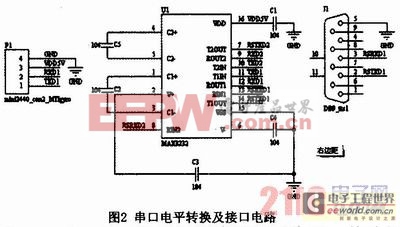
在TMS320F2812的串行通信接口工作時,其功能可以通過軟件可編程實現(xiàn),當接收到數(shù)據(jù)后,通過事件管理器模塊中的通用定時器,PWM單元以及捕獲單元對電機的方向和速度進行控制。

相關(guān)推薦
-
-

-
simonmao8385 | 2014-01-16
-
-
-
-

-
-
-
-
-
-
-
-
-
-

-
-
dolphin | 2014-06-12
-
-
-

-
-
dolphin | 2014-06-12
-
-
simonmao8385 | 2014-01-20
-
評論