基于路徑識別的智能車系統設計

當需要智能車減速時,PI控制器計算值為負,令PWM5輸出的PWM信號占空比為零,PWM3輸出的PWM信號占空比與計算值的絕對值相同,并且計算值越負,OUT2的電平高出OUT1越多,電機有反轉趨勢。反之,當需要智能車加速時,PI控制器計算值為正,PWM3輸出的PWM信號占空比為零,PWM5輸出的PWM信號占空比與計算值的絕對值相同,計算值越大,OUT1的電平高出OUT2越多,電機有正轉趨勢。
2軟件設計
本系統的控制方案是根據路徑識別模塊和車速檢測模塊所獲得的當前路徑和車速信息,控制舵機和直流驅動電機動作,從而調整智能車的行駛方向和速度。圖7為系統程序流程圖。

智能模型車的路徑搜索算法(LineSearchingAlgorithm)是智能車設計中的關鍵部分。本系統路徑搜索算法采用簡單的switch語句,根據檢測到黑線的光電管的位置判斷舵機的偏轉角度,同時給出相應的速度控制信號。其程序流程圖如圖8所示。

3實驗驗證
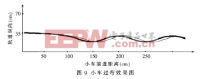
智能車路徑識別的關鍵在于快速地判斷彎道并快速、準確地響應。智能車行進過程中,從長直道進入連續彎道時,由于曲率變化很小,此時轉速的設定值較大,加之舵機響應時間的限制,智能車極易脫離軌跡。采用加長轉臂的舵機及合理的路徑搜索算法,可以增強智能車對軌跡的跟隨性能。圖9所示為智能車尋跡連續彎道試驗效果圖。其中,粗線為所尋跡的黑線,細線為智能車實際運行軌跡。
本文設計了一個智能車控制系統,實現了快速自動尋跡功能。在硬件上,該系統采用MC9S12DG128B單片機為控制核心,協調電源模塊、路徑識別模塊、車速檢測模塊、舵機控制模塊及直流驅動電機控制模塊的工作;在控制算法上,采用路徑搜索算法和類PI控制算法實現對智能車的舵機轉角和電機轉速的控制。此外,系統還完成了對加長轉臂舵機的控制,實現了轉向伺服電機與車速的配合控制。實驗結果表明,該智能車系統響應快,動態性能良好,整體控制性能良好。













評論