汽車雷達傳感器組網技術研究

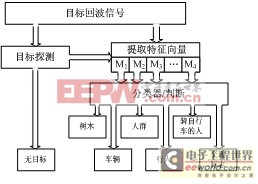
圖5汽車雷達對目標的分類處理過程
FMCW雷達的基本原理是利用發射和回波信號之間的頻率差來確定目標的距離和速度[5]。傳統體制的FMCW采用等周期調頻,在測量單個目標的情況下,簡單可行,表現了良好的實時性和測距測速功能。但是當前方出現多個目標的時候,雷達就會出現判斷上的困難。為了識別多個目標的距離和速度,可以采用變周期的FMCW波形作為發射信號。文獻[6]給出了采用變周期的發射信號測量目標的距離和速度的算法。
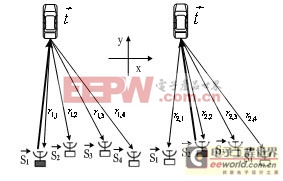
圖6汽車雷達網絡對單目標實現測量
對于本文所討論的雷達網絡系統而言,四個近距離雷達傳感器即是發射機又是接收機。如圖6所示,通過電掃開關的控制,其中的一個NDS擔當發射機,反射信號被四個NDS同時接收。經過信號處理之后,因各個NDS之間位置的不同,可以得到四組關于被測目標的距離和相對速度值(r1,1v1,1)、(r1,2v1,2)、(r1,3v1,3)、(r1,4v1,4)。這種采用單基地發射多基地接收的雷達網絡體制,盡管對傳感器之間的時間同步控制要求很高,但是可以避免鄰近傳感器之間的相互干擾。
汽車雷達網絡測量目標的距離和速度是通過對每個傳感器測得的目標信息進行數據融合而得到的。在一個測量周期中,每個NDS輪流擔當一次發射機。因此有16種距離和相對速度的組合,用向量表示為:

在笛卡爾坐標系中用目標的狀態向量來表述目標的位置矢量和相對速度矢量:
 (2)
(2)每個傳感器在笛卡爾坐標系中的位置用向量表示為:
 (3)
(3)對于每個傳感器而言,如果已知該傳感器和目標在坐標系中的位置,那么距離可以由下面的非線性方程來計算:
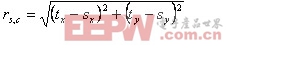 (4)
(4)同理,得到關于目標的相對速度的方程:
 (5)
(5)綜合方程(1)、(2)、(4)、(5),可以得到目標的狀態向量與四個傳感器測得的目標的距離速度的多個非線性方程,用向量函數表示成:
其導數矩陣,也就是雅可比矩陣為:
 (7)
(7)對方程(7)采用高斯-牛頓迭代算法可以精確計算出目標狀態向量的參數值,繼而可以得到目標的位置和相對速度值。由于上述運算能夠給出運動目標位置的笛卡爾坐標,因此很方便確定位置估算的精度和分辨率[7]。
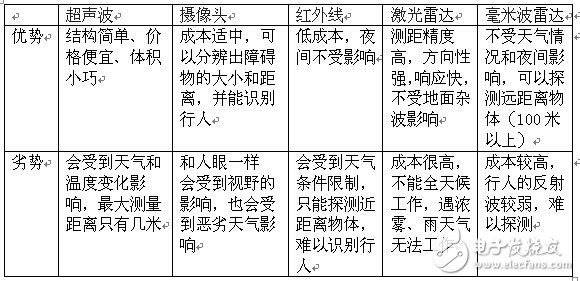
毫米波汽車雷達網絡的發展現狀
目前,盡管國際上將毫米波汽車雷達網絡的77GHz頻段的研究很充分,但是,具體采用什么頻段,每個國家還有差異,目前關于汽車用近距離雷達傳感器的爭論焦點之一是采用24GHz頻段還是77GHz頻段。爭論的原因是77GHz雷達器件的成本和技術成熟度問題。因此,77GHz雷達傳感器的成本和技術成熟度是汽車雷達網絡是否能夠在市場上取得普及應用的關鍵。
在77GHz雷達傳感器的研發方面,關鍵技術是如何采用GaAs(鎵砷)器件的工藝技術來設計和制造低成本的汽車近/遠距離雷達傳感器,進而降低整個汽車雷達網絡的成本。國外GaAs器件制造業發展的速度很快,已經出現了一些極具性價比的汽車雷達傳感器,一些報道甚至預言在2007年末2008年,汽車雷達網絡的市場將啟動,并有望成為普及型轎車的基本配置。
汽車雷達網絡相對于其它系統,技術門檻要低得多。目前,中國汽車雷達的開發還主要集中在汽車倒車雷達、汽車雷達測速器的層面上,所使用的技術和頻段差別很大,還沒有從器件、頻率分配、汽車雷達網絡結構、近距離和遠距離雷達傳感器、運動目標位置估算算法、運動目標的分類、汽車專用信號處理器等多層次、系統和產業鏈的角度來研究和開發汽車雷達網絡技術,這與國際上日益普及的汽車雷達研究與應用相比,還存在很大的反差。這種狀況與中國作為全球的汽車消費大國的地位是不相適應的。



評論