汽車雷達傳感器組網技術研究

汽車雷達網絡關鍵技術解決方案
與單個雷達傳感器相比,多傳感器組網的優勢在于測量精度高,誤報率低以及多目標識別的優越性能。測量精度高、誤報率低源于數據融合技術,這就要求每個傳感器在時間、頻率上精確同步;多目標識別取決于系統自身對目標的識別分類能力。因此,在整個雷達網絡包括每個雷達傳感器的設計上都要圍繞著這兩點來進行。
1近距離傳感器設計
近距離雷達傳感器主要擔負著汽車前向35米內的目標探測,是汽車雷達網絡在復雜路況下發揮效能關鍵部分。近距離雷達傳感器主要包括射頻單元、接收機和各個傳感器的之間的精確時間同步控制。在天線的設計上,既要符合所示的波束寬度的要求,同時又不能增大傳感器的體積。因此可以采用印刷體線性陣列天線。
接收機主要由一些低頻元件、抗混疊濾波器和模數轉換裝置構成。這些低頻元件所產生的噪聲可以淹沒微弱的回波信號,是影響探測距離的主要因素之一,因此要盡可能的降低噪聲參數。此外,模數轉換的采樣頻率應該依據近距離傳感器的性能參數來確定。近距離傳感器的原理圖如圖3所示。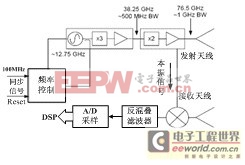
圖3近距離傳感器結構圖
2同步控制
雷達組網后,同樣是通過測量發射信號和回波信號之間的頻率差來確定目標的位置。但不同于單個雷達探測,汽車雷達網絡測量目標的距離和速度是通過對每個傳感器測得的目標信息進行數據融合而得到的。為了測量目標距離以及產生一致的波形,發射機和接收機要有統一的時間標準,這就是時間上的同步。
為了能接收和放大回波信號,雷達傳感器的發射機和接收機必須工作在相同的頻率,當發射機頻率捷變時,接收機本振要作相應的變化,即要實現頻率上的同步。汽車雷達網絡對傳感器之間的時間同步控制誤差要求在10ns內。所以高精度時間頻率同步系統是汽車雷達傳感器組網的關鍵技術。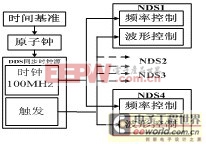
圖4同步系統框圖
圖4給出了基于DDS同步時鐘源的配置,各個收發單元上的DDS同步時鐘源的參考頻率源應采用高穩定度的原子鐘(如銣、銫原子鐘)。各收發單元的原子鐘要定期的用同一時間基準來校準。用作校準的時間基準的精度要更高一些,它們可以是GPS(導航星全球定位系統),羅蘭C或彩色電視發射臺發射的時間基準信號.
3汽車雷達網絡的目標分類算法
目標分類系統的主要任務是針對目標回波信號特征計算給定向量的分類關系,分類器定義了一組不同的目標類別。分類器的工作可以分為研究階段和分類階段,在研究階段分類器對若干特征和經過獨立標記的特征向量進行自動分析;在分類階段,要對每個被檢測到的目標生成特征向量。
與此同時,識別算法采用最大似然方法進行判決,以判別特征向量屬于哪個類,如圖5所示。在汽車應用中,由于分類任務很復雜,通常一個給定的向量需要考慮幾個特征,因而要采用多個分類器,其優點是在研究階段能夠在一次迭代過程中評估某個特征對決策過程的影響,并自動剔除對決策過程影響較小的項目。
基于汽車雷達傳感器的目標分類系統的系統結構和信號處理過程,它可以識別六種不同的雷達目標的類別,包括:步行者、騎自行車的人、車輛、人群、樹木和交通標志等。



評論