一種基于CAN總線的監控系統設計及位定時分析

位時間參數計算規則
位時間參數計算規則是為保證系統在極端惡劣條件的兩個節點間,能夠正確接受并解碼網絡上的信息幀。極端惡劣條件是指這兩個節點的鐘振偏差在系統容忍偏差極限的兩端,并且兩個節點間具有最大的傳輸延遲。在沒有噪音干擾的正常通信情況下,相位誤差累計的最壞情況是:重同步邊沿之間間隔有10個位周期(5個顯性位后跟5個隱性位)。實際系統都運行在噪音環境中。由于噪音干擾,可能會導致重同步邊沿之間的間隔超過10個位周期,在這種情況下必須進行嚴格的采用,否則可能進入錯誤處理模式。本監控系統各節點模塊是以sja1000作為can控制器的。所以,考慮各方面的影響,位定時參數在只有1個取樣點時的公式設置如下:
( sjw) min =max{(20×nbt×δf)/(1 - δf) ,((nbt(1-25×δf )- prop max -(1 -δf)+prop min/2))/(1-δf)}
( s j w) max = 4
t(seg2) min = max{2 , s j w}
t(seg2) max =min{8,((n b t (1-25×δf ) - ( pro p) max)/
(1 - δf), (nb t(1 - 25×δf) - ( pro p)
max - (1-δf) + prop min )/ 2) / (1-δf )
以上所述為位時間參數的計算規則,在實際監控系統中,以此規則根據適當的方法進行位定時參數確定和優化,使系統性能達到最優。
結語
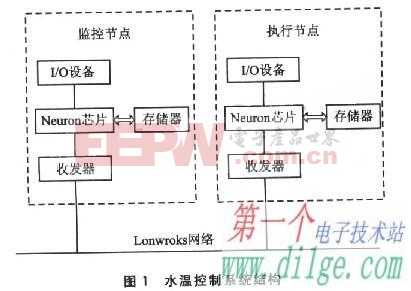
現場總線系統用開放的現場總線控制通信網絡將自動化最底層的現場控制器和現場智能儀表設備互連的實時網絡控制系統。是工業控制系統發展的一個新的階段。本文所設計的基于can總線的監控系統設計簡單方便,性能穩定,能很好的滿足控制系統對實時性和可靠性的要求,并在現場運行,效果良好。






評論