一種基于CAN總線的監控系統設計及位定時分析

引言
can(controller area network)即控制器局域網,是國際上應用最廣泛的現場總線之一。與一般的總線通信相比,can的數據通信具有突出的可靠性、實時性和靈活性。本課題設計了一種基于can總線的監控系統,并對位定時這一關鍵問題進行了詳細的闡述。借助該系統,使用者可以實現對can網絡的實時監控,并可對系統參數進行優化。
監控系統整體結構
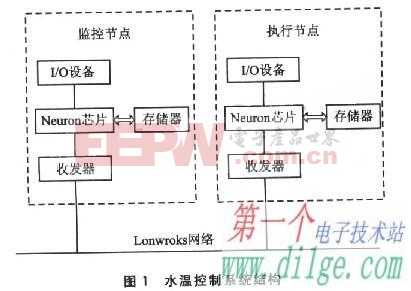
整個監控系統(如圖1)是一個分布式控制系統,由三部分組成:上位機、轉換模塊、can節點。上位機負責監控整個系統的運行狀況;轉換模塊作為各個節點與上位機的通信中介,實現上位機與節點間的雙向通信;各個can節點均可以在任意時刻,遵循通信協議完成上傳信息和執行控制命令等任務。

can節點接口電路設計
can總線上各節點均采用atmel公司生產的8位單片機為主控器,除完成節點自身的控制功能外,還與can控制器sja1000配合以實現can網絡通信功能。
設計中選擇sja1000控制器并采用其性能優越的pelican擴展模式。can收發器tja1050是philips公司生產的高速can總線驅動器。tja1050具有速率高、低功耗、電磁性能優越等特點。can接口電路如圖2所示。
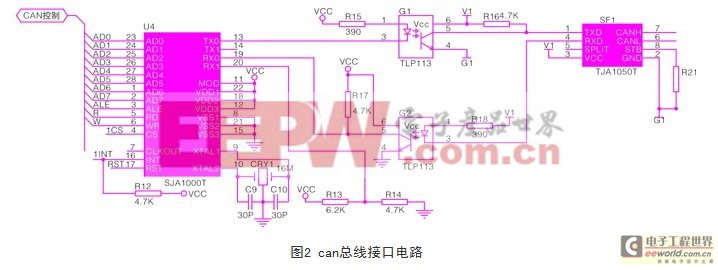
節點模塊中采用高速光耦來實現收發器與控制器之間的電氣隔離,抗干擾。光耦選擇高速器件tlp113以滿足在最高速率500kbps下的電氣響應。采用dc/dc模塊提供5v電源并實現系統電源與網絡電源之間電氣隔離措施。為了確保該系統的安全,在dc/dc模塊及系統的輸入和輸出端增加tvs保護。
系統通信的實現
can控制器協議
can控制器實現的串口通信網絡遵循osi模型,劃分為兩層:數據鏈路層和物理層。物理層按照ieee802.3lan標準構造,實現將數據發送到傳輸介質上和接收數據流的功能。在數據鏈路層實現比特流的拼裝。can通信協議約定了4種不同的幀格式,本系統中使用標準幀格式,其格式如表1。can首先接收到仲裁場,根據仲裁場的內容判斷所接收到的信號是哪種幀格式,用戶將相應的數據寫入數據場中進行發送,或從數據場中讀取接收到的數據。






評論