一種基于CAN總線的監控系統設計及位定時分析

位周期參數確定
在初始化can控制器的時候,要考慮配置總線時序寄存器的配置等重要問題。事實上,can通信協議中規定、通信波特率、位周期的取樣點以及取樣個數均可以自主設定,這樣為用戶在網絡通訊性能的優化上提供了空間。如果位周期采樣點偏后,可以接受較大的信號傳輸延遲,相應總線的傳輸距離可以延長;如果周期的取樣點接近中間,則可以容忍系統節點間的參考時鐘誤差。這些矛盾直接影響了網絡系統性能,所以總線位定時非常重要,合理的位定時可以提高系統的整體性能。
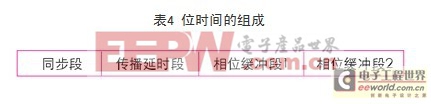
can 總線周期由4個部分組成: 同步段(sync_seg) 、傳播延時段、相位緩沖段1 ( phase_seg1) 和相位緩沖段2 (phase_ seg2) ,如表4所示。
同步機制
can是有效支持分布式實時控制的串行通訊網絡。從位定時的同步方式考慮,它實質上屬于異步通訊協議,每傳輸一幀,以幀起始位開始,而以幀結束及隨后的間歇場結束。這就要求收/發雙方從幀起始位開始必須保持幀內信息代碼中的每一位嚴格的同步。從位定時編碼考慮,它采用的是非歸零編碼方式,位流傳輸不像差分碼那樣可以直接用電平的變化來代表同步信號,它屬于自同步方式(接收端設法從收到的信號中提取同步信息的方式),can節點從一個位值到另一個位值的轉變中提取時鐘信息。為保證同步質量,can協議定義了自己的位同步方式:硬同步和重同步。
通過同步機制,可以消除由于相位誤差帶來的影響,保證信息正確解碼。硬同步后,內部的位時間從同步段重新開始。因此,硬同步強迫同步沿處于重新開始的位時間同步段之內。重新同步的結果使相位緩沖段1增長,或使相位緩沖段2縮短。相位緩沖段加長或縮短的數量有上限,此上限由重新同步跳轉寬度給定。
一個沿的相位誤差由相關同步段的沿的位置給出。相位誤差定義如下:
le = 0如果沿處于同步段里;
le 》 0 如果沿處于采集點之前;
le 《 0 如果沿處于前一個位的采集點之后。
當引起重新同步沿的相位誤差的幅值小于或者等于重新同步跳轉寬度的設定值時,重新同步和硬同步的作用相同。當相位錯誤的量級大于重新同步跳轉寬度時有2種情況:
如果相位誤差為正,則相位緩沖段1被增長,增長的范圍與重新同步跳轉寬度相同;
如果相位誤差為負,則相位緩沖段2被縮短,縮短的范圍與重新同步跳轉寬度相同。
硬同步和重新同步是同步的2種形式,遵循以下規則:
在一個位時間里只允許一個同步;
僅當采集點之前探測到的值與緊跟沿之后的總線值不相符合時,才把沿用作于同步;
總線空閑期間,有一“隱性”轉變到“顯性”的沿,無論何時,硬同步都會被執行。






評論