基于PID算法的船舶航跡自動控制

1 引言
當船舶在大海中航行時,通常利用自動舵系統改變舵角從而使船舶沿著期望的航跡自動航行[1]。自動舵系統是根據航跡偏差信息自動完成操縱舵機的裝置,是在隨動操舵基礎上發展起來的一種自動控制操舵方式。它可以代替人工操舵,保持船舶在設定航向或預定航跡上航行,實現航向保持、航向改變以及航跡保持的功能。自動舵不僅可以減輕舵手的勞動強度,而且在遠航時,在相同的航行條件下,可以減少偏航次數,減小航向偏差,從而提高航速,縮短航行時間,節省燃料,提高航行的經濟效益[2,3]。
2 視線掃描導航系統設計
2.1 航跡控制方案設計
航跡控制分為直接航跡控制和間接航跡控制。直接航跡控制是依據航跡偏差直接改變舵角,從而使船舶的實際航跡能夠跟蹤期望航跡。間接航跡控制是通過航跡偏差計算期望的航向信息,再利用期望的航向與實際船舶航向的偏差改變舵角,從而實現航跡控制。
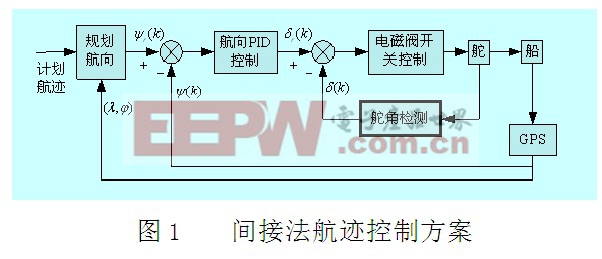
本文采用間接航跡控制方式,如圖1所示,內環為船的舵角控制,用于操縱舵機使實際舵角與規劃舵角一致,從而使船舶航向發生改變,中環為船的航向控制,是將GPS測量的當前船舶航向與航向規劃器產生的期望航向相比較,航向誤差送入航向PID控制器,從而產生期望的舵角變化值,外環為船舶的航跡控制,通過航跡跟蹤算法計算可以消除航跡偏差的規劃航向。
2.2 航跡跟蹤方式
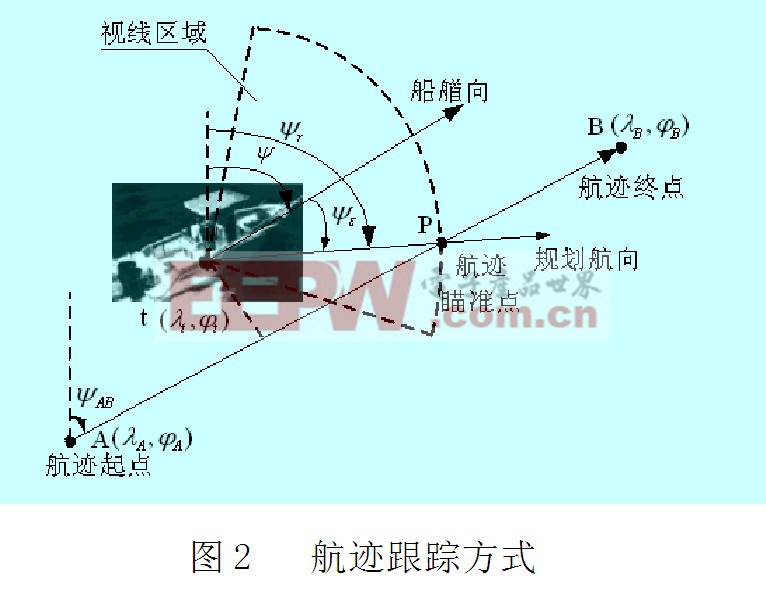
船舶在航行過程中受到風、浪及海流等因素的影響,出現航跡偏差問題。本文通過GPS系統獲取的船舶實際位置信息對航跡偏差進行解算,以獲取可消除航跡偏差的航向修正角度。圖2所示為航跡跟蹤方式原理圖。人工駕駛時,船舶駕駛人員會在一定的視線區域實時觀察船舶前方有無障礙物和是否偏離期望的航跡。因此在船舶航跡自動控制時,模擬人工駕駛設定視線掃描區域,當航跡偏差在一定范圍時,視線掃描區域與預定航跡相交于航跡瞄準點P。當前船位與航跡瞄準點P形成的航跡瞄準方向即為經視線導航策略導出的規劃航向角度![]() 。利用GPS系統反饋的船舶位置、航向信息以及設定的航跡信息可計算出當前的規劃航向角度
。利用GPS系統反饋的船舶位置、航向信息以及設定的航跡信息可計算出當前的規劃航向角度![]() 從而解算出可消除航跡偏差的規劃航向角度
從而解算出可消除航跡偏差的規劃航向角度![]() 。解算具體過程如下所示。
。解算具體過程如下所示。
計劃航跡向角度![]() 可通過計劃航跡點坐標解算獲得:
可通過計劃航跡點坐標解算獲得:
其中![]() 為從赤道到緯度
為從赤道到緯度![]() 的緯線之間的距離,即
的緯線之間的距離,即
將A、B點的緯度坐標代入到式(3)計算出![]() 數值,再利用(2)式可解算出計劃航跡向角度
數值,再利用(2)式可解算出計劃航跡向角度![]() 由于航跡瞄準點P在計劃航向AB上,所以用AP點、PB點計算出的航向角度與計劃航向相同。
由于航跡瞄準點P在計劃航向AB上,所以用AP點、PB點計算出的航向角度與計劃航向相同。
利用式(1)、(2)即可計算出航跡瞄準點P位置坐標![]() 。由此可利用式(1)得到當前船位點與瞄準點形成的規劃航向角度值
。由此可利用式(1)得到當前船位點與瞄準點形成的規劃航向角度值![]() 。
。
經視線導引策略解算出的規劃航向角將傳遞到航向控制系統中。通過對船舶的航向控制使船舶按規劃航向角度方向行駛,從而使船舶相對于預定航線的偏差逐漸趨向零。該跟蹤規律可以使船舶在逼近預定航線縮短航跡偏差的同時,使得船舶航向角度趨近于預定航線的航向角。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理







評論