基于ADRC的井下機器人運動控制技術

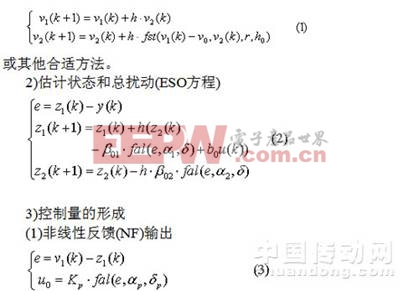
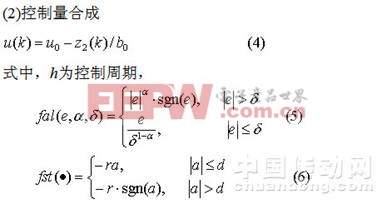
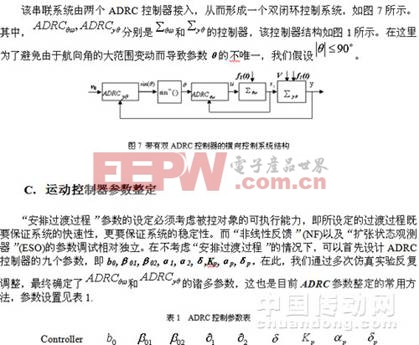
ADRC的離散算法
將上述理論進行離散化后可得ADRC各環節的離散化公式如下:
安排過渡過程
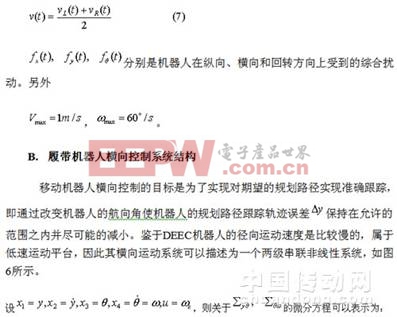
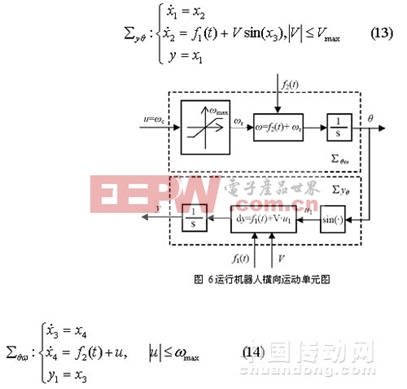
3.2DEEC機器人橫向運動控制器設計
DEEC機器人運動學方程
DEEC機器人采用3臺Maxthon大功率直流有刷電機,一臺用于驅動履帶臂,兩臺驅動左右履帶輪。機器人的最大移動速度為1m/s,最大回轉速度為60°/s,可以實現零半徑轉彎,也可以按制定半徑轉彎。由于本節主要分析車體的橫向運動,所以不考慮履帶臂的影響,建立的模型只考慮左右兩履帶輪。為了使機器人有更大的智能性,我們對其進行建模。為進行橫向控制,我們模型基礎上開發相應的控制算法。
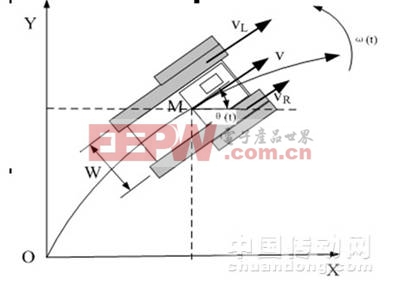
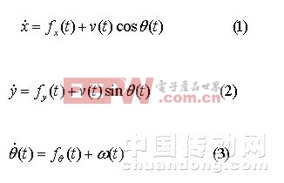
機器人模型運動曲線如圖5所示。圖5中,XOY為地球固連參考坐標系,為右手坐標系;坐標O為機器人的運動起點;機器人經過時間t,從O點運動到M點(機器人的幾何中心的移動)。由此可以推導出如下關系式:

結束語
ADRC技術在DEEC機器人運動控制器設計中發揮了重要作用,本文在此基礎上詳細闡述了DEEC機器人橫向控制器的設計,并對運行參數進行了整定,得到了較好的控制效果。

評論