基于ADRC的井下機器人運動控制技術

擴張狀態(tài)觀測器
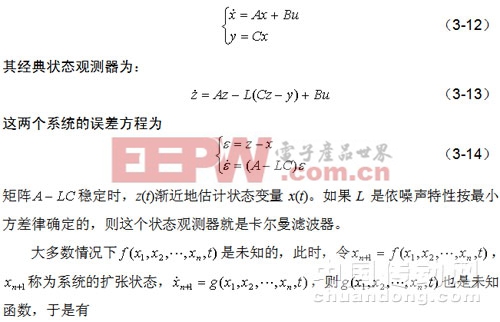
擴張狀態(tài)觀測器是韓京清于1995年提出的一種新型狀態(tài)觀測器,它能跟蹤系統(tǒng)的各階狀態(tài)變量,估計系統(tǒng)未建模動態(tài)和系統(tǒng)外擾的總作用量,同時對系統(tǒng)的未建模動態(tài)和外擾進行補償,利用非線性環(huán)節(jié)實現(xiàn)了對非線性系統(tǒng)的動態(tài)反饋線性化,是自抗擾控制器的核心。
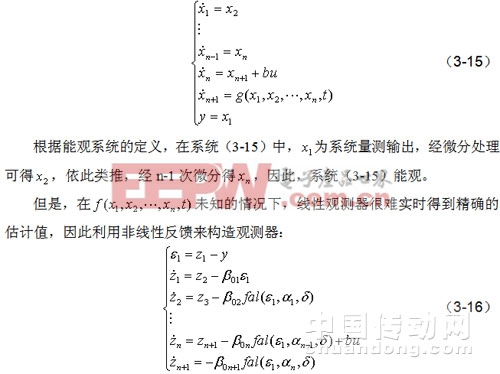
對于系統(tǒng)方程
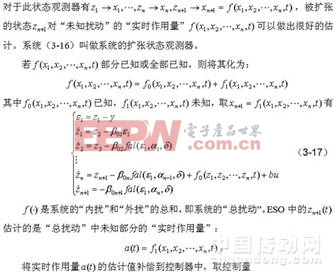
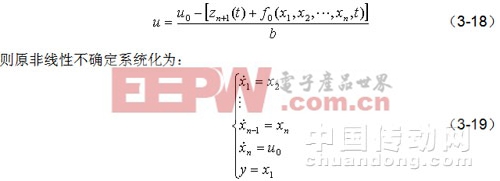
以看到,式(3-19)形式相同,即擴張狀態(tài)的前饋補償將非線性不確定系統(tǒng)轉化為線性系統(tǒng)標準型:積分串聯(lián)型。
可見,擴張狀態(tài)觀測器將被控系統(tǒng)中含有的非線性動態(tài)、模型不確定性及外部擾動等都視為擴張狀態(tài)加以實時觀測、估計,利用前饋環(huán)節(jié)對擴張狀態(tài)觀測值進行補償,實現(xiàn)了非線性系統(tǒng)的反饋線性化。
對于二階系統(tǒng)

非線性誤差反饋
首先介紹一下非線性函數(shù)fal。在實際控制工程界,常用到經(jīng)驗知識:“大誤差,小增益;小誤差,大增益”。而非線性函數(shù)函數(shù)
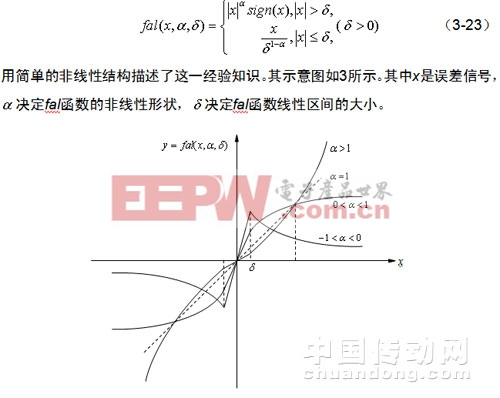
圖3 非線性函數(shù)fal示意圖
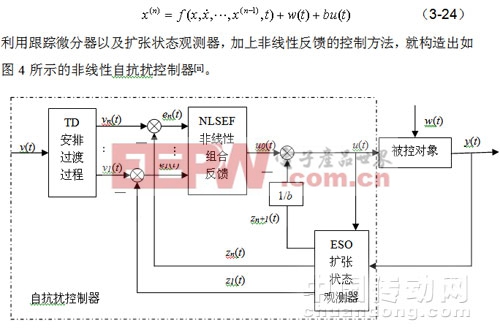
圖4 自抗擾控制器的結構圖

由此,得到了自抗擾控制器的三個組成部件:跟蹤微分器(TrackingDifferentiator,TD),擴張狀態(tài)觀測器(ExtendedStateObserver,ESO)和非線性誤差反饋(NonlinearStateErrorFeedback,NLSEF)。其中,跟蹤微分器TD的作用是安排過渡過程,實現(xiàn)對系統(tǒng)輸入信號的快速無超調跟蹤,并給出良好的微分信號。擴張狀態(tài)觀測器ESO用來估計系統(tǒng)狀態(tài)、模型和外擾,是自抗擾控制器的核心部分。擴張狀態(tài)觀測器把有未知外擾的非線性不確定對象反饋化為“積分器串聯(lián)型”以后,就可以設計出理想的基于“狀態(tài)誤差反饋”控制器。對“狀態(tài)誤差反饋”采用合適的合適的“非線性配置”,就實現(xiàn)了非線性狀態(tài)誤差反饋控制律。其中擾動的自動估計與補償正是最為關鍵的一環(huán),“自抗擾控制器”也因此而得名。

評論