基于ADRC的井下機器人運動控制技術

如今,自抗擾控制器已經經歷了30多年的發展歷程。由于該控制器算法簡單,參數適應性廣,是解決非線性、不確定性、強干擾、強耦合、大時滯等控制問題的一種有效方法,具有較強的適應性、魯棒性和可操作性,越來越多的科研工作者加入到自抗擾控制算法的研究行列中。目前,自抗擾控制器已經在電機控制、過熱汽溫控制、動力調諧陀螺儀、單級旋轉倒立擺、機器人控制、大射電望遠鏡艙位姿態控制、飛行器姿態控制、船舶減搖鰭等諸多領域得到應用,并取得了良好的控制效果。
研究自抗擾控制器在船舶航向控制系統中的應用,不僅可以拓展自抗擾控制器的應用領域,而且可以有效的提高船舶的控制品質,具有很好的研究意義。
3DEEC機器人橫向運動自抗擾控制器設計
3.1二階系統自抗擾控制器的一般形式
很多被控對象可以簡化成如下形式:
其中,w為對象外部擾動,u為控制量,b(t)為控制量放大系數,y為輸出, f(x,w,t)是對象“總擾動”。對于該一階對象,其ADRC控制器的標準結構一般如圖1所示。
圖1 ADRC控制器的標準結構
由圖1可見,ADRC由三部分組成:“安排過渡過程”,“非線性反饋(NF)”和“擴張狀態觀測器(ESO)”。圖中,v0為控制目標,v1是v0的跟蹤信號;z1是系統輸出y的估計,z2是對象總擾動f(x,w,t)的估計;e是誤差,u0是NF的輸出,b0是b(t)的估計。
? 安排過渡過程:
在一般的控制系統中,誤差直接取成:
e = v - y
式中, v 為設定值; y 為系統輸出。
誤差的這種取法使初始誤差很大,易引起“超調”,很不合理。根據對象承受的能力,我們先安排合理的過渡過程v1 ( t ) , 然后誤差取成e =v1(t)-y,這是解決PID 的“快速性”和“超調”之間矛盾的有效辦法, 也是提高調節器“魯棒性”的一種辦法。
在實際工程問題中,常存在由不連續或帶隨機噪聲的量測信號合理地提取連續信號及微分信號的問題。過去采取的是線性微分器及線性濾波手段,但是仍不能滿意解決問題,跟蹤微分器就是利用非線性函數來實現對輸入信號廣義導數的一種光滑逼近。
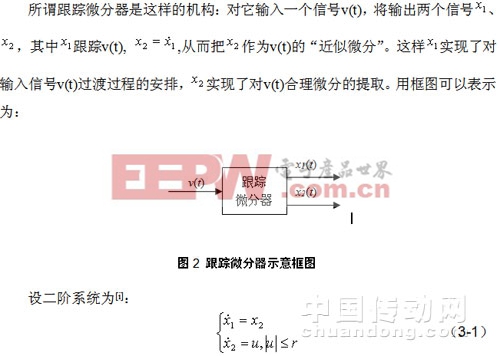

跟蹤微分器就是一個信號處理環節,自抗擾控制器主要是充分利用了它的跟蹤特性和提取微分信號的特點,實現了對輸入信號過渡過程的安排及微分信號的提取。特別地,當輸入信號發生突變時,跟蹤微分器可以為控制器提供光滑的輸出信號作為輸入,使控制量輸出連續地變化,不會因為輸入的突變而產生超調,增強了系統的穩定性。跟蹤微分器給出了閉環系統的一種可以實現的動態性能指標,這種給定對于被控對象來說不再是一種穩態的期望值,而是一種可實時跟蹤的曲線。同時,在輸入信號存在外界擾動時,跟蹤微分器還可以實現濾波的作用。

評論