四輪轉向汽車電子控制技術

4.1.3 車身橫擺角速度傳感器
車身橫擺角速度傳感器安裝在汽車質心處的車身上,采用壓電射流角速度傳感器,檢測汽車轉向行駛時的車身橫擺角速度,以電信號的形式輸入ECU,ECU輸出控制信號,實時控制汽車的轉向運動,保證汽車轉向行駛時的動態穩定性。
4.2 電控單元(ECU)
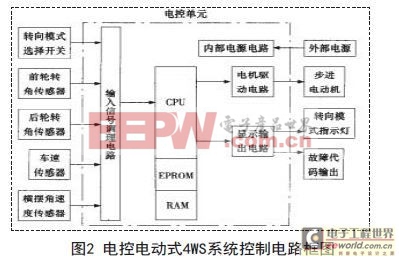
ECU是4WS系統的核心,其功用是根據制定的控制方案,按照編制的程序對各種傳感器輸入信號進行分析、計算、處理,輸出一定的控制信號指令,驅動步進電動機動作。其電控單元的控制框圖如2圖所示,4WS系統ECU主要由輸入信號調理電路、微處理器、輸出信號處理電路、電源電路等硬件部分和控制程序、軟件平臺等軟件部分組成。為保證控制系統可靠地工作,電控單元還必須采取有效的抗干擾措施和故障自診斷處理措施。
4.3 步進電動機
電動機采用步進電動機,其功用是根據ECU的指令輸出適宜的轉矩和轉角,驅動后輪轉向機構,控制后輪的轉向,是后輪轉向系統中的驅動執行元件。步進電動機是一種數字控制電動機,將數字式電脈沖信號轉換成角位移,控制性能好,非常適合于單片機控制。采用步進電動機的主要優點是:步進電動機的角位移與輸入脈沖數嚴格成正比,隨動性好,可與角度反饋環節組成高性能的閉環數控系統;動態響應快,易于實現起停、正反轉及變速;具有自鎖和保持轉矩能力;結構簡單,堅固耐用,抗干擾能力強。
4.4 減速機構
減速機構的功用是降低步進電動機轉速,增大步進電動機傳遞給轉向傳動機構的轉矩,常采用蝸輪蝸桿機構或行星齒輪機構。
4.5 后輪轉向傳動機構
不同的車型,后輪轉向傳動機構的結構形式也不一樣,可采用傳統的轉向機構形式,也可根據汽車后懸結構和行駛轉向要求,設計特定結構形式的后輪轉向機構。
5.電控電動式4WS系統的特點分析
5.1 電控電動式4WS與普通2WS系統對比分析
電控電動式4WS汽車與普通的2WS汽車相比,電控電動式4WS汽車具有如下特點:
(1)轉向操作的響應加快,準確性高。
(2)轉向操作的輕便性和行駛穩定性提高。低速時,轉彎半徑小,轉向操作的機動靈活性提高(如圖3所示)。
(3)超車時,變換車道更容易,減小了汽車產生擺尾和側滑的可能性。抗側向干擾的穩定性效果好。
5.2 電控電動式4WS與電控液壓式4WS系統對比分析
電控電動式4WS系統與電控液壓式4WS系統相比,也具有顯著的優勢:
①采用步進電動機作為后輪轉向系統的驅動執行元件,動態響應快,改善了瞬態轉向靈敏度,有效地降低了電控液壓式轉向系統的轉向滯后特性。
②步進電動機的角位移與輸入脈沖數嚴格成正比,在轉動過程中,無累積誤差,隨動性好,轉向控制精度高,回正性好。
③系統剛性大,有較高的慣性力矩,抗外界干擾的能力強。結構緊湊,體積小,質量輕,裝配布置方便。
④步進電動機由蓄電池供電,發動機動力消耗。沒有液壓系統裝置,系統的調整和檢測方便,裝配自動化程度高,能縮短系統產品的生產和開發周期。
6.電控電動式4WS系統的技術展望目前在成型的4WS汽車中主要采用電控液壓式4WS系統。雖然電控電動式4WS系統發展較晚,相應的技術還不夠成熟,存在動力小、ECU復雜、成本高等不足之處,但隨著現代電子技術、電機技術的飛速發展和應用,電控電動式4WS系統在技術上將不斷完善,在轉向控制性能、系統布置、節能等方面也將越來越顯示其優越性,其應用前景廣闊,必將取代電控液壓式4WS系統,并成為4WS系統發展的主流。它的發展趨勢有以下幾點:
(1)針對4WS系統,進一步開發、設計高性能、高精度、高靈敏度的傳感器,以便于正確地檢測汽車的運動信號。
(2)將先進的控制理論與控制方法應用于4WS控制器的研究中,提高轉向控制性能。
(3)改進步進電動機的結構和控制技術,消除步進電動機工作時存在的振蕩、失步、振動、噪聲等不足。
(4)研究、設計結構合理、布置方便的后輪轉向傳動機構,實現后輪的正確轉向。
(5)進一步簡化系統,減小系統結構的體積,控制生產成本。
(6)把4WS技術與其它主動安全技術(如4WD、ABS、ASR、ASC、DYC等)相結合,實現汽車主動底盤技術的綜合控制,這是主動控制4WS系統研究的長期目標。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理










評論