四輪轉向汽車電子控制技術

1.前言
隨著現代道路交通系統和現代汽車技術的發展,人們對汽車的轉向操縱性能和行駛穩定性的要求日益提高。作為改善汽車操縱性能最有效的一種主動底盤控制技術--四輪轉向技術。于二十世紀80年代中期開始在汽車上得到應用,并伴隨著現代汽車工業的發展而不斷發展。汽車的四輪轉向(Four-wheel steering-4WS)是指汽車在轉向時。后輪可相對于車身主動轉向,使汽車的四個車輪都能起轉向作用。以改善汽車的轉向機動性、操縱穩定性和行駛安全性。
隨著對4WS這一領域研究的不斷進展,出現了多種不同結構形式、不同控制方案的實用4WS系統。按照控制和驅動后輪轉向機構的方式不同,4WS系統可分為機械式、液壓式、電控機械式、電控液壓式和電控電動式等幾種類型。本文介紹的是電控電動式4WS系統。
2.電控電動式4WS系統的發展概況
從20世紀初,日本政府頒發第1個關于四輪轉向的專利證書開始,對于汽車四輪轉向技術的研究一直伴隨著汽車工業的發展而進行著。1985年,日本的NISSAN在客車上應用了世界上第1例實用的4WS系統,開始了現代4WS系統的研究與開發。在技術相對成熟的4WS汽車中,大多數采用電控液壓式4WS系統,主要用于前輪采用液壓動力轉向的4WS汽車中,這種4WS系統具有工作壓力大、工作平穩可靠等優點。但由于液壓動力系統在結構、系統布置、密封性、能耗、效率等方面的不足,尤其是在轉向過程中存在著響應滯后的固有缺陷,使得電控液壓式4WS系統在適應現代4WS汽車的轉向靈敏性、準確性方面受到了束縛,不能滿足汽車高速行駛穩定性的要求。1988年3月,日本鈴木公司開發出電控電動式助力轉向系統(EPS),首次裝備在CERVO車上,有效地克服了液壓動力轉向系統的缺點。在EPS技術的基礎上,電控電動式4WS系統應運而生。1992年,在日本本田序曲的汽車上采用了電控電動式4WS系統。1993年,在日產全新的LAUREL車系上也開始采用電控電動式的4WS系統。電控電動式4WS系統結構簡單、布置容易、控制效果好。
隨著電子技術的飛速發展,計算機技術在汽車中的廣泛應用,電控電動式4WS將是4WS汽車的發展趨勢。
3.電控四輪轉向系統的基本組成和工作原理
3.1 電控四輪轉向系統的基本組成
電控電動式4WS系統是指采用電子控制、電機助力的4WS系統,前、后輪轉向系統之間沒有任何機械連接、油管連接裝置,結構上相互獨立。如圖1所示。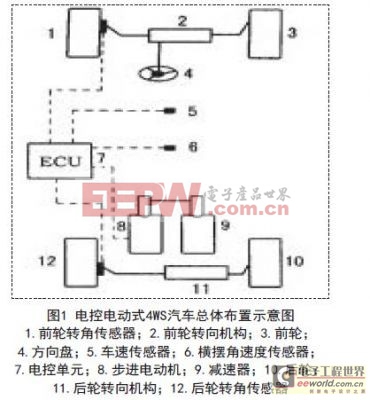
典型電控電動式4WS系統主要由前輪轉向機構、傳感器、電控單元(ECU)、步進電動機。減速器和后輪轉向機構等組成。本文介紹的電控電動式4WS系統前輪仍采用傳統的轉向系統,后輪采用電子控制、電機驅動的轉向系統。
3.2 電控四輪轉向系統的工作原理
轉向時,傳感器將前輪轉向的信號和汽車運動的信號送入ECU,ECU進行分析計算,向步進電動機輸出驅動信號,步進電動機動作,通過后輪轉向機構控制驅動后輪偏轉。同時ECU進行實時監視汽車狀況,計算目標轉向角與后輪實際轉向角之間的差值,來實時調整后輪的轉角。這樣可以根據汽車的實際運動狀態,實現汽車的四輪轉向。
系統可設有兩種轉向模式,既可進入4WS狀態,也可保持傳統的2WS狀態,駕駛員可通過駕駛室內的轉向模式開關進行選擇。當4WS汽車在行駛過程中電子控制系統出現故障時,后輪自動回到中間位置,汽車自動進入前輪轉向狀態,保證汽車像普通前輪轉向汽車一樣安全地行駛。同時儀表板上的4WS指示燈亮,警告駕駛員,故障情況被存儲在ECU中,以便于維修時檢碼。
上述的電控電動式4WS系統后輪轉向裝置屬車速感應型,其工作特點是后輪偏轉的方向和轉角大小主要受車速高低的控制,同時也響應前輪轉角、橫擺角速度的變化。ECU根據設定的控制策略,通過程序控制,實現汽車的四輪轉向。在低速行駛或者方向盤轉角較大時,前、后輪實現逆相位轉向,且后輪偏轉角度隨前輪轉角增大而在一定范圍內增大。這種轉向方式可改善汽車低速時的操縱輕便性,減小汽車的轉彎半徑,提高汽車的機動靈活性。在中、高速行駛或方向盤轉角較小時,前、后輪實現同相位轉向。使汽車車身的橫擺角速度大大減小,可減小汽車車身發生動態側偏的傾向,提高汽車高速行駛的操縱穩定性。
4.4WS系統電控部分的組成
4.1 傳感器
傳感器的功用是檢測汽車轉向時的有關運動物理量,并轉換成電信號,輸入到ECU中,供ECU進行分析計算。
4.1.1 前、后輪轉角傳感器
前、后輪轉角傳感器分別安裝在前、后輪轉向機構靠近車輪的一側,采用非接觸型霍爾元件傳感器,用來檢測前、后車輪的瞬時偏轉角。
4.1.2 車速傳感器
車速傳感器安裝在車速里程表的轉子附近,采用光電式車速傳感器,將汽車前進速度檢測出來,以脈沖信號的形式輸出,送入四輪轉向系統ECU,同時將電信號輸入到自動變速器ECU.

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理










評論