六軸數控系統和交流伺服在工業機械手臂中應用

2.臺達交流伺服系統的主要特點:
(1)具有多種控制模式,可與上位控制器靈活配合,應用廣泛。
(2)通過伺服內置的運動控制器和外部的I/O來自由規劃的8組位置指令寄存器是實現對機械第七軸(D軸)控制的關鍵。
(3)強健式的控制模式,在負載慣量大范圍的變化時,系統仍然可以保持優異的性能。
(4)具有位置P-CURVE和速度S-CURVE平滑功能,且命令來源不論是外部模擬量輸入還是內部寄存器設定均有平滑功能。
(5)豐富的軟件功能,方便用戶用調試。
通過比較分析,臺達交流伺服系統也完全能夠滿足作為機械手臂做下位控制器要求。
通過對機械結構、負載慣量、輸出扭矩的分析計算,故選用下列伺服:ASDA 3kW*1臺、ASDA 2kW*1臺、ASDA 1kW*2臺、ASDA 200W*2臺、ASDA 100kW*1臺,共7臺伺服驅動器做下位控制器。
三、方案功能的實現
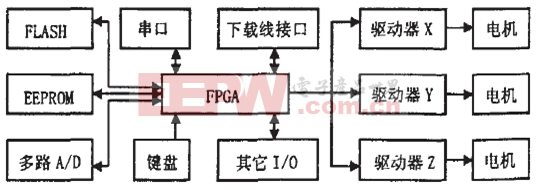
1.控制系統6AXIS+1 AXIS的架構如下圖:
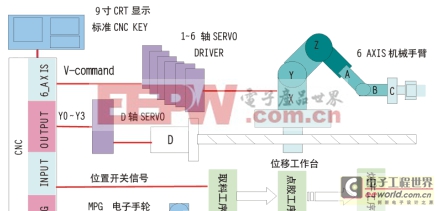
圖二 64XIS+1 AXIS的控制架構
2.硬件的組成和6+1的設計架構實現
控制系統的硬件部分主要有CNC數控系統、伺服系統和其他輔助元件三部分組成。
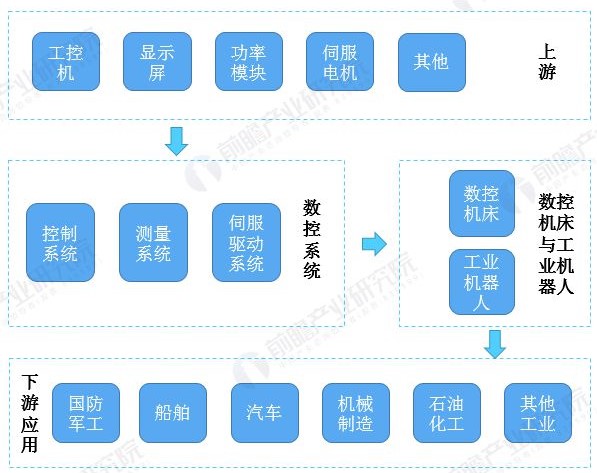
(1)CNC數控系統
數控系統選用中達六軸數控系統,它是機械手臂的控制中心,除具有線性插補等運動控制外,還能夠進行畫面顯示、參數設定、程序編輯、PLC邏輯控制等。
(2)伺服系統
伺服系統選用7套臺達-A系列交流伺服驅動器和電機。其中ASDA 3kW*1臺、用于獨立控制機械D軸位移工作臺,拖動機械手臂前后運動,使其能自由移動到生產線的任何地方。其伺服控制模式采用臺達交流伺服獨有的PR控制模式。
它的命令來源為臺達交流伺服位置指令寄存器8組內部位置指令(參數P1-15~P1-30設定),伺服電機運轉的速度則由參數P1-36~P1-43設定。
通過數控系統I/O輸出OUTPUT點Y0-Y3,配合伺服CN1接口的I/O,POS0~POS2與GTRG,就可以選擇8組中的一組來當成位置指令來源。當伺服CTRG信號上升沿觸發后,伺服電機便會向給定目標運動。
其余6臺伺服分別為:ASDA 2kW*1臺,控制機械手臂X軸空間移動;ASDA 1kW*2臺,控制機械手臂Y、Z軸的空間移動;ASDA 200W*2 臺,控制機械手臂A、B軸的空間移動;ASDA 100kW*1臺,控制機械手臂C軸的空間移動。
這六臺伺服采用的是速度控制模式,數控系統的伺服軸口輸出 +/-10V的模擬量電壓來控制伺服電機旋轉,并實時通過伺服驅動器的PG分周比輸出OA/OB/OZ信號將伺服運動狀態反饋給數控系統,來實現半閉環控制的目的,來保證機械手臂的運動精度。
(3)其他輔助元件
其他輔助元件主要有:
電子脈沖發生器(MPG手搖輪),規格DC5V,在手動和教導模式下,產生脈沖信號控制伺服軸位移。
動力變壓器,規格7.5kVA三相380V/三相220V,作用是給伺服系統提供動力電源。
控制變壓器,規格500VA,AC380V/AC220V,作用是給數控和伺服系統提供控制電源。
開關電源,規格500VA,DC24V,AC220V/DC24V,作用是給控制回路提供直流控制電源。
INPUT輸入板,規格NPN型,可以連接按鈕、行程開關、繼電器觸點等傳感器信號。
OUTPUT輸出板,規格NPN型,作用是控制中間繼電器、微型電磁閥等DC24V負載。
中間繼電器,規格DC24V,增加OUTPUT輸出板的容量,線路保護。
氣動電磁閥,規格DC24V,控制機械手夾緊氣缸和生產線其他輔助動作。
按鈕、開關若干,提供各種傳感信號。
通過上述硬件配置和架構設計,中達電通六軸數控系統便能夠通過速度模擬量電壓命令和外部的I/O輸出信號來控制一個六軸的機械手臂和一個獨立的位移工作臺運動了。
3.示教功能和手搖輪測試功能的實現

圖三 示教盒
中達六軸數控系統具有“示教和手搖輪測試”功能,通過必要的PLC編輯便可以激活這兩個功能,方便編譯和效驗程序。
當配合外部I/O和電子手搖輪,激活“示教”功能后,六軸機械手臂的工作方式是按“示教學習→生成NC程序→編輯修改NC程序→機械手臂再現執行”的過程來完成的,即由人用示教盒對機械手臂工作行為示教。示教過程中,數控系統會記錄下機械手臂各運動關節終點的位置信息,并以NC代碼的形式顯示在CRT 熒屏上。
當機械手臂完成一個示教流程結束后,數控系統便會以NC代碼的形式記錄下一個數據隊列。用戶可以通過數控系統的標準CNC鍵盤對當前的NC程序進行必要的編輯,如添加運動速度,數控外部I/O控制等指令,這樣數控系統便生成了機械手臂工作所需要的完整信息。
當完成編輯后,激活數控系統的“自動運行”功能,數控系統便能自動依次讀取這個數據隊列和指令信息,并傳達給下位伺服控制器和數控外部I/O控制機械手臂動作。
當我們對“示教”生成的數據信息進行編輯完成后,在執行“自動運行”功能前,可以通過激活“手搖輪測試”功能,來再次校正編輯完的程序。
當“手搖輪測試”功能被激活后,機械手臂會按照先前編輯的指令信息再現動作。伺服軸的運動速度由手搖輪的轉動速度和MPG的倍率所決定,當手搖輪停止轉動,伺服軸也會停止進給;如繼續轉動,伺服軸會繼續執行動作,從而有效防止機械撞機。

伺服電機相關文章:伺服電機工作原理



評論