配視覺系統的直角坐標機器人的應用實例

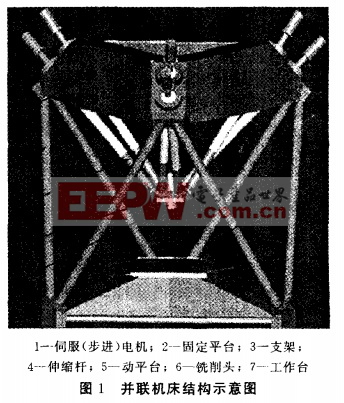
機器人按ISO 8373定義為:位置可以固定或移動,能夠實現自動控制、可重復編程、多功能多用處、末端操作器的位置要在3個或3個以上自由度內可編程的工業自動化設備。這里自由度就是指可運動或轉動的軸。直角坐標機器人是以直線運動軸為主,各個運動軸通常對應直角坐標系中的X軸,Y軸和Z軸。在絕大多數情況下直角坐標機器人的各個直線運動軸間的夾角為直角。
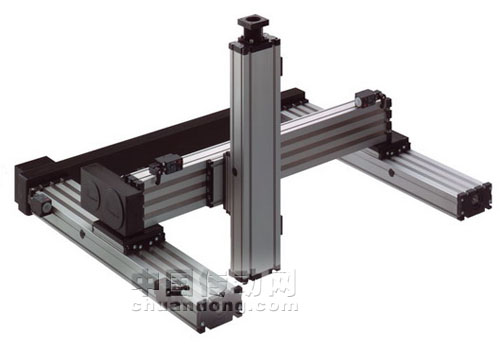
直角坐標機器人主要由一些直線運動單元,驅動電機,控制系統和末端操作器組成。針對不同的應用,可以方便快速組合成不同維數,各種行程和不同帶載能力的壁掛式、懸臂式、龍門式或倒掛式等各種形式的直角坐標機器人,從簡單的二維機器人到復雜的五維機器人就有上百種結構形式的成功應用案例。從食品生產到汽車裝配等各行各業的自動化生產線中,都有各式各樣的多臺直角坐標機器人和其它設備嚴格同步協調工作,可以說直角坐標機器人幾乎能勝任所有的工業自動化任務。下面是其主要特點:
1 任意組合成各種結構樣式,帶載能力和尺寸的機器人,
2 采用多根直線運動單元級連和齒輪齒條傳動,可以形成幾十米的超大行程機器人。
3 采用多根直線運動單元平連及各帶多滑塊結構時其負載能力可增加到數噸。
4 其最大運行速度可達到每秒8米,加速度可達到每秒4米。
5 重復定位精度可達到0.01mm~ 0.05mm。
6 采用帶有RTCP功能的五軸或五軸以上數控系統能完成非常復雜軌跡的工作。
二 德國VC視覺系統簡介
機器視覺就是使機器有人眼和大腦的部分功能,能自動進行幾何形狀測量,印刷質量缺欠識別和產品外觀質量識別等工作。機器視覺系統通常用在全自動化、高效可靠和非接觸的大批量生產過程中的檢測識別工作。常見的視覺系統一般包括:光源、鏡頭、CCD攝相機、圖像采集卡、圖像處理軟件、監視器、通訊/輸入輸出單元等。而許多智能相機就是一個通用圖象處理系統,把鏡頭、圖象傳感器、高速DSP、存儲器、常用圖像處理軟件、通訊口和/輸入輸出口等集成在一個香煙盒大小的盒內,用戶可以任意編程,能代替基于PC機的圖象處理系統。智能相機有彩色智能相機和黑白智能相機,有線陣和面陣智能相機,本文僅介紹一款德國VC公司面陣黑白CCD智能相機。
工作時首先CCD智能相機將被攝取目標轉換成灰度圖像信號,先放大該信號,再數字化為數字圖像。數字圖像以二維矩陣存儲起來,如Vision Components GmbH公司智能像機VC2028的每一幅數字圖像都是640*480的二維矩陣。該矩陣的每一個元素叫像素,它的數值通常是0~255。像素的數值0~255對應目標的最暗和最亮處。圖像處理軟件就是根據圖像中像素分布和亮度變化等信息抽取圖像中目標的特征,如:孔的數量、面積、形狀、長度、形狀寬度和位置等,還可以是亮度變化等,然后與所存的模板進行比較匹配,最后給出尺寸、角度、偏移量、個數、合格/不合格、有/無等。結果。
用戶可以在PC機上用C語言或VC編寫自己的應用程序,然后下傳到智能相機里,智能相機運行該程序來完成特定的任務。也可以選用VC公司配帶的圖象處理軟件。
三 機器人數控系統
該機器人的控制系統采用德國運動控制技術公司(Movtec)的三軸運動控制卡DEC4T和運動控制軟件Editasc。DEC4T運動控制卡是基于PC機,專用控制3臺步進電機和數字伺服電機的運動控制卡。EdiTasc不僅是MOVTEC公司各種控制卡配套的通用數控軟件,它也是一個高度開放的開發平臺,可以直接控制各種工業自動化設備,或方便的開發用戶專用頁面及控制系統。DEC4T自帶36路數字輸入輸出口,來作為限位開關,控制CCD智能相機和起動檢測儀器。

c語言相關文章:c語言教程
伺服電機相關文章:伺服電機工作原理
評論