基于前饋混合控制的BOOST型PFC控制器

根據控制理論知識,前饋控制可以消除擾動對系統的影響,從而提高系統的動態特性.負載電流的前饋控制如圖3中虛線部分所示,其中GI(s)為前饋補償器的傳遞函數.根據圖3,可以得到直流輸出電壓

若選取前饋控制器的傳遞函數為
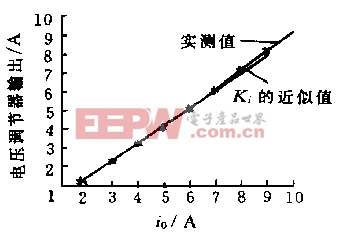
此時,可完全消除負載電流io的變化對系統直流輸出電壓Vc的影響.但前饋控制器GI(s)是否能夠完全補償io的擾動,取決于Gi(s)的結構和參數.由前面的分析可知,Gi(s)是一個小時間常數的一階慣性環節,當系統運行在穩態時,Gi(s)相當于一個放大倍數為Ki的比例環節,此時可以精確地測定放大倍數Ki.實際上,由于系統中存在著非線性特性,在整個負載變化范圍內,Ki并不是固定的.實驗中測得的Ki與負載電流io的關系如圖4所示.從圖中可以看到:負載電流在1~7A區間時,整流器的放大倍數Ki基本上為一常數;在7~10A區間內,Ki略有增大. 可見,由于系統的非線性特性,在整個負載范圍內,整流器的放大倍數是變化的.再加上整流器時間常數Ti也是隨電壓調節器輸出i的幅值變化而變化的,因此,從理論上講,設計一個能夠完全補償io擾動的前饋補償器是不可能的.我們可以通過適當地設計前饋補償控制器GI(s),對io擾動作近似補償或者作穩態補償,其余的部分再由反饋控制器作稍許調節,從而提高系統的動態性能.
在控制系統中,忽略輸出電容C的充放電電流時,i2只與負載吸收的功率相對應.加入前饋控制器GI(s)后,在穩態的理想情況下,GI(s)的輸出就與i2完全相等,也就是說,電壓調節器Gv(s)的輸出為0.

評論