基于BD6225芯片的H橋電機驅動器

基于BD6225芯片的H橋電機驅動器電路如圖2所示。該應用電路是微處理器與BD6225芯片的接口電路,它們組成了驅動電機的閉環控制電路。FINA和FINB腳、RINA和FINB腳與微處理器I/O腳連接,OUT1A腳和OUT2A腳、OUT1B腳和OUT2B腳引出電線分別接電機M1、M2。PWM控制信號通過FINA和FINB腳、RINA和FINB腳輸入,根據PWM控制信號的占空比來決定直流電機的轉速和轉向。
3.1 電機工作狀態的控制
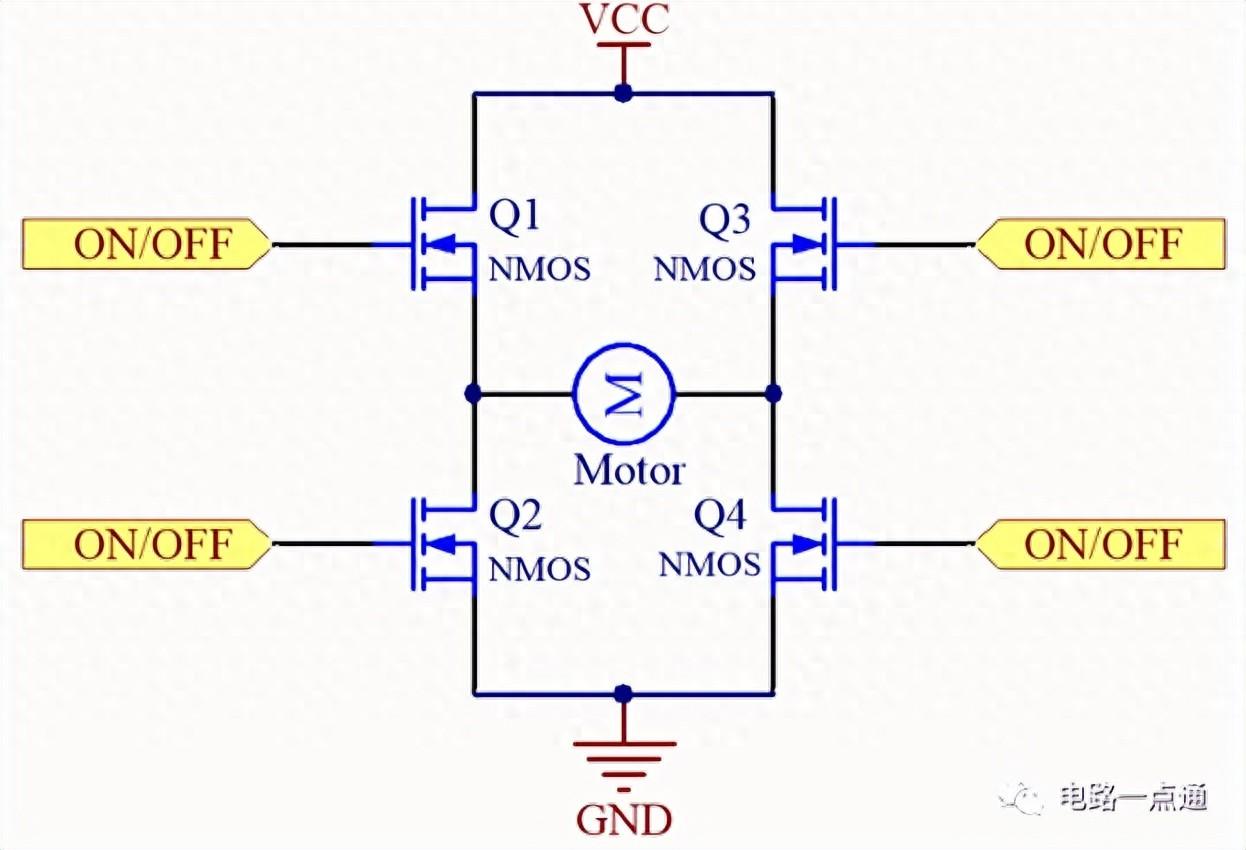
BD6225芯片內部集成8個功率MOSFET,可以組成兩組標準的H型電機驅動器。芯片內部邏輯控制電路中設置了電機的4種工作狀態:正轉、反轉、剎車、待機,這4種工作狀態可以通過設置6腳(VRFE)、4腳(FIN)、5腳(RIN)的邏輯狀態來調節。表1給出了各個模式下的設置及其電機的工作狀態, 圖3給出了各種模式下輸出MOSFET和電機的工作狀態。
(1)待機模式(Stand-by mode)
內置直通電流的防止電路,待機時啟用誤動作防止電路。待機模式是通過設置VREF腳上的電平來實現,同時應將FIN腳和RIN腳設置為低電平。在待機模式下,芯片內部電路都關閉(包括輸出MOSFET),實現零消耗電流。當電機從運轉模式轉向待機模式時,系統會自動進入空轉狀態(由于有二極管的存在)。而其它模式轉向待機模式時(剎車模式除外),在所有電路關閉之前,內部控制邏輯將最少保持50μs的高電平狀態。
(2)正轉模式(Forward mode)
當OUT1為高電平、OUT2為低電平時,電機處于正向旋轉狀態稱為正轉模式,此時應將FIN腳設置為高電平,RIN腳設置為低電平,VREF腳連接Vcc。在正轉模式下,電流方向如下:Vcc→OUT2腳的上端MOS管→電機→OUT1腳的下端MOS管→地。
(3)反轉模式(Reverse mode)
當OUT1為低電平、OUT2為高電平時,電機處于反向旋轉狀態稱為反轉模式,此時應將FIN腳設置為低電平,RIN腳設置為高電平,VREF腳連接Vcc。在反轉模式下,電流方向如下:Vcc→OUT1腳的上端MOS管→電機→OUT2腳的下端MOS管→地。
(4)剎車模式(Brake mode)
剎車模式常常出現在要求電機快速停止轉動(短路剎車閘)。與待機模式不同,內部控制電路處于剎車模式。如果要求停止電機旋轉,最好采用待機模式,因為剎車模式快速停機需要消耗較大的功率。
 本文引用地址:http://www.104case.com/article/230483.htm
本文引用地址:http://www.104case.com/article/230483.htm圖3 各種模式下輸出MOS管和電機的工作狀態:(a)待機模式;(b)正傳模式;(c)反轉模式;(d)剎車模式
3.2 電機轉速的調整
(1)PWM控制模式
PWM控制模式是通過在FIN腳、RIN腳輸入PWM信號來控制電機的轉速。在這種模式下,PWM頻率在20kHz~100kHz范圍內可調。高電平側的功率MOSFET(高電平的輸出端)的電平固定不變,低電平側的功率MOSFET(低電平的輸出端)的電平工作在開關狀態。采用PWM控制模式時,應將VREF腳連接Vcc。圖4給出了PWM控制模式下輸入端和輸出端的波形圖。

圖4 PWM控制模式下輸入端和輸出端的波形圖




評論