基于FPGA的動態可重構系統的通信結構研究

3.2 通信結構
3.2.1 分類
基于片上總線策略的通信結構有: RMBoC(Reconfigurable Multiple Bus on Chip)和BUSCOM。基于片上網絡策略的通信結構有: DyNoC(Dynamic Network on Chip)和CoNoChi(Configurable Network on Chip) 。
RMBoC是為多處理器系統提出的,基于可重構多總線網絡改進而來的。任何系統級的重構都不會改變RMBoC的模塊和物理拓撲,應用層上的通信結構改變是通過層疊網上的點對點通道。該結構具有高靈活性,但是可伸縮性較弱,其結構如圖2所示。

圖2 RMBoC結構圖
DyNoC是首個將基于包的NoC方案用于可重構設計的結構,它由處理單元和路由器組成二維陣列,每個處理單元都連接一個路由器,路由器之間相互連接。該結構的可伸縮性、延展性和可模塊化性能都很好,只是靈活性欠佳。一個5×5的DyNoC系統結構圖如圖3所示。
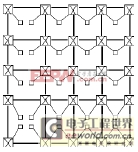
圖3 5×5 DyNoC系統結構圖
4種結構的設計參數見表1,執行參數(在VirtexII上實驗得到)見表2。特別指出,片上總線的執行參數是針對整個結構,而片上網絡的執行參數是針對單個交換節點。
這4種結構都能很好地滿足動態可重構FPGA的設計要求。片上網絡的結構體現了較好的結構參數,但是片上面積花費巨大,所以當設計側重片上效率時,首選片上總線的結構。
另外,BUSCOM只需要很少的硬件資源,而在分層總線結構中RMBoC的靈活性優于BUSCOM;CoNoChi具有最佳的結構參數,是理論上最支持動態可重構的結構,但是在VirtexII平臺上執行具有一定困難,因而設計了DyNoC來適應VirtexII平臺有限的可重構能力。
3.2.2 DyNoC的應用實例
交通燈控制(TLC)可以用一個3×3的DyNoC來實現,由3個模塊組成: VGA控制器(VGA),交通燈視覺模塊(LV)和交通燈控制模塊(TC)。VGA模塊可以顯示目前路口情況、行人控制鍵和燈信號;交通燈視覺模塊負責控制交通燈內部構造,由VGA模塊顯示;交通燈控制模塊(TC)用來獲取行人需求。VGA發出X和Y 像素掃描的位置給交通燈視覺模塊,并接收需要顯示的顏色;FSM模塊用來監控行人的鍵控輸入(片上有兩個按鈕),向交通燈視覺模塊發送轉換燈狀態的信息,然后顯示相應顏色的燈。在3×3 DyNoC中,用正中的路由器來實現與其他所有路由器的連接,其他路由器也保持相互通信以確保高通信量。整個交通燈控制(TLC)的實現可以在沒有中斷和故障的情況下運行。
表1 4種結構的設計參數

表2 執行參數(在VirtexII上實驗得到)

4 相關問題和發展趨勢
① 目前片上系統設計中各IP組件可重用,但通信結構無法重用。因此在系統重構時,怎樣為動態配置的模塊提供一個靈活快速的通信接口成為主要問題。可研究一種動態可重構的NoC架構,能為各IP之間的通信提供靈活的接口,并能通過片上引腳與板級系統的其他芯片進行數據交換,提供較好的通信質量QoS,包括高吞吐量和短延遲等。
② NoC設計的一個重要問題是決定路由類型,這對網絡的性能和功耗有重要影響。路由策略越復雜,設計面積就越大,因此需要在面積和性能之間進行折中。選擇路由策略應主要考慮實現的復雜性和性能需求兩大問題。
③ 重構時隙將影響系統功能的連續性,為提高動態可重構計算系統性能,如何避免或減少重構時隙是實現動態重構系統的瓶頸問題。對于多重context結構的 D
結語
本文介紹了可重構體系結構和典型的動態可重構計算結構;詳細分析了動態可重構系統的通信結構,并對4種通信結構的主要性能進行實驗,得出對比數據;列舉了一種結構在交通燈控制中的應用實例;最后探討了動態可重構技術研究面臨的相關問題和發展趨勢。












評論