基于FPGA的高速HIL仿真器實現電機控制器測試

電機在現代生活中扮演著重要角色。出于對安全、成本及效率的考慮,工程師——尤其是混合電動力汽車(HEV)工程師——往往希望在特定的真實環境下通過仿真電機模型對電機控制器進行測試。
由于在經濟及環境等方面展現出的優勢,HEV受到了廣泛的關注,而電機正是HEV的核心部件。尤其是考慮到HEV的電機及電力電子器件體積大, 成本高; 在讓控制器去控制這些實際的部件前, 先用硬件在環仿真的方法來測試和驗證控制器的性能是非常必要的.
本文討論基于FPGA而設計的高速HIL仿真器來實現電機控制器測試。下圖為HIL測試系統。
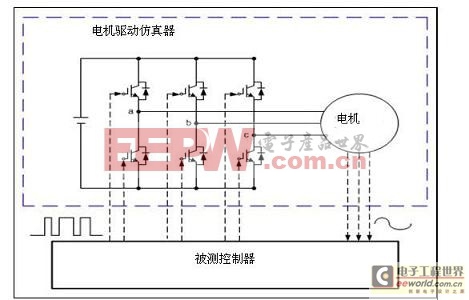
電機驅動仿真器包括DC電壓源、逆變器橋路以及電機。我們支持永磁同步電機(PMSM)及無刷DC電機(BLDC).
為何需要基于FPGA的硬件在環仿真器
現代電機驅動系統通常由脈沖寬度調制(PWM)所驅動。下圖描述了PWM的基本概念。
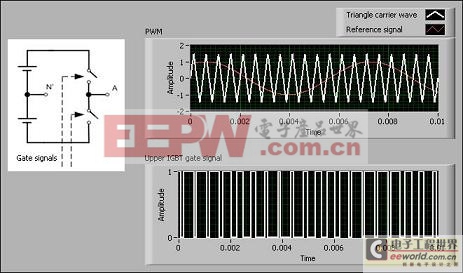
電機控制器將參考波形與三角載波相比較,從而確定門控制信號的狀態。













評論