2.2 程序設計
在程序中首先需要將高速計數器配置為A/B相正交輸入,4倍計數速率,增計數,并使能高速計數器,然后將標定好的各檔位位置填入相應的地址中,并且設置允差為兩個脈沖,也就是說各檔位的脈沖數加減2即為相應的到位。伺服系統傳動裝置的間隙是多樣性的,并且對伺服控制的性能有影響,設置允差的目的是為了消除由于伺服傳動間隙引起的系統不穩定,從而準確定位。位置定位程序的流程如圖5所示。
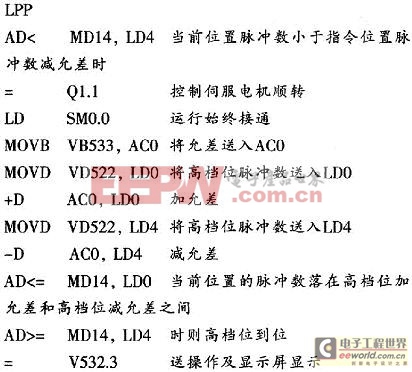
在程序設計時除順、逆限位和順轉、逆轉的互鎖程序外,重點在于如何用PLC實現多點重復定位。主要設計程序如下:

伺服電機相關文章:伺服電機工作原理








評論