基于單片機的鏈梯降速控制系統的設計

2 系統軟件設計
整個速度控制系統的軟件設計包括主程序設計和各種功能的子程序設計。其中主程序主要負責整個系統的上電初始化,以及功能化寄存器和端口寄存器的狀態設置。下面分別給出主程序和幾個主要處理子程序流程圖。
2.1 主程序
主程序即管理級程序,主要完成系統的初始化,并等待中斷信號。其流程圖如圖5所示。

2.2 測速子程序
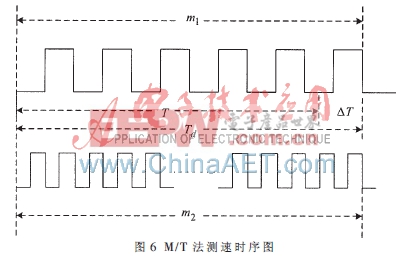
本系統發電機轉速測量采用M/T法[4] 實現,定時器T0對外部脈沖計數,記取傳感器輸出脈沖個數m1,定時器T1對內部脈沖進行計數,記取時鐘脈沖個數m2,定時器T2確定采樣周期T,定時器定時開始時刻總是與傳感器的第1個脈沖前沿保持一致,在T時間內得到脈沖數m1。同時,另一個計數器對標準時鐘脈沖進行計數,當定時T結束,只停止對外部脈沖計數,而在定時結束后傳感器輸出第一個脈沖前沿時,才停止對標準時鐘的計數,并得到m2,其持續時間Td=T+ΔT,轉速
2.3 模糊PID控制程序
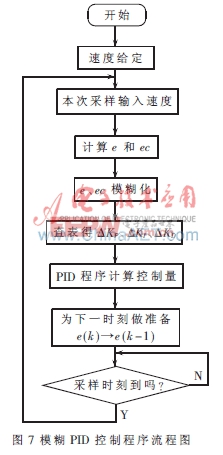
為了減少在線計算的復雜性,盡可能地提高算法的實現速度,本系統采用查表的方法實現PID參數的模糊實時調節。控制程序流程圖如圖7所示。
本系統通過調整發電機的負載電流,也即改變負載電阻來控制發電機的轉速,從而控制鏈梯的下降速度,這是本文的一個主要創新點。系統以AT89C52單片機為核心,進行了鏈梯降速控制系統的硬件與軟件設計。硬件部分主要是轉速檢測電路與驅動執行電路的設計。另外為了保證系統的正常運行,設計了看門狗電路。軟件部分主要是主程序與部分子程序的設計。此外采用了模糊PID控制算法,在保留常規PID控制算法優點的基礎上,當參數發生變化時還具有較強的適應能力和良好的抗干擾性能,使鏈梯穩定下降的速度始終保持在0.4 m/s 0.5 m/s。
參考文獻
[1] 余永權.ATMEL89系列單片機應用技術[M].北京:北京航空航天大學出版社,2002.
[2] 李維國,俞曉紅.一種新的單片機“看門狗”電路軟件設計方法[J].國外電子元器件,2000(10).
[3] MAXIM. Product Selector Guide.2000.
[4] 李永東.交流電機數字控制系統[M].北京:機械工業出版社,2002.

pid控制器相關文章:pid控制器原理











評論