基于單片機的鏈梯降速控制系統的設計

高層建筑遇險無動力循環鏈梯逃生裝置,對居住于高層建筑的人們遇火逃生十分必要。無動力消防鏈梯是一種典型的變負載非線性系統,隨著負載的增加,發電機繞組中的電流增加,磁場增強,轉速加快,鏈梯的下降速度也增大。系統要求不論負載如何變化,鏈梯穩定下降的速度必須保持在0.4 m/s~0.5 m/s,為此,本文設計了一種基于單片機的參數自適應模糊PID控制器,根據鏈梯的實際響應在控制過程中自動調整、修改和完善控制規則與參數,從而使系統的控制性能不斷完善,達到最佳的控制效果。
1 系統的主要硬件電路設計
控制系統的硬件主要由傳感器、控制器和執行器三大部分組成。傳感器作為輸入部分,用于測量發電機的轉速,將其轉換為電信號;控制器的作用是接收傳感器的輸入信號,并按設定的程序進行計算處理,輸出結果;執行器則根據控制單元輸出的信號驅動執行機構,使之按要求變化。控制系統的結構框圖如圖1所示。
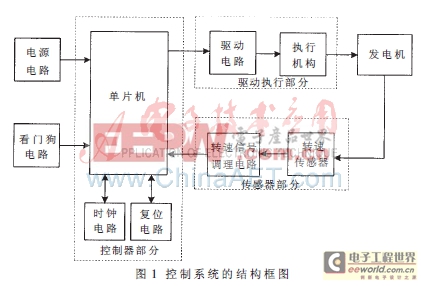
通過轉速傳感器不斷采集發電機轉速,進入單片機中進行Fuzzy-PID算法處理。單片機把采集到的速度偏差e和偏差變化值ec經模糊算法處理(查表),在線調整KP、KI、KD,最后通過PID算式計算控制輸出量u。輸出量u控制晶閘管的通斷來控制負載電阻的大小。
本控制系統以ATMEL89C52單片機為核心。AT89C52屬于MCS-51單片機的改進型,是一種高性能的CMOS8位微控制器。由于其內置8 KB的Flash存儲器,大大簡化了單片機系統的結構[1]。
1.1 轉速檢測電路
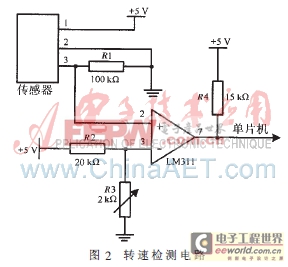
傳感器輸出比較微弱的脈沖信號,需要轉換為幅值為+5 V的單片機標準輸入信號,用LM311比較器實現。實際電路如圖2所示。R2、R3用于調整比較器的基準電壓,設定為0.25 V。當傳感器的輸出電壓高于基準電壓時,比較器輸出為+5 V的高電平,反之則輸出為0 V的低電平。比較器上拉電阻的大小會影響輸出幅度,由500 Ω改為15 kΩ后,輸出幅值增大。經過該電路輸出穩定、規則的波形。
1.2 驅動執行電路
在單片機系統中,每一路電阻對應一個接口,當人員發生變化時,只要根據控制量使相應的端口輸出高電平,晶閘管導通,就可以改變負載電阻調節發電機的轉速。
由于單片機輸出的信號不足以觸發晶閘管,故須將觸發功率放大。從單片機的端口輸出觸發脈沖,觸發脈沖要經過光電隔離器和三極管。光電隔離器用來提高系統抗干擾能力,三極管用來增大驅動電流。此電路由緩沖器、光電隔離器、變壓器等部件組成,如圖3所示。
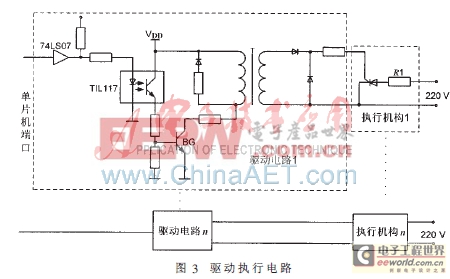
當單片機AT89C52端口無脈沖信號時,光電隔離器TIL117截止,變壓器無脈沖輸出,當單片機端口有脈沖信號時,光電隔離器TIL117導通,從而使相應的三極管BG導通,這樣觸發脈沖經脈沖變壓器T輸出,促使晶閘管觸發導通。
1.3 看門狗硬件電路
鏈梯系統中為了保證單片機可靠穩定運行,需要“看門狗”監視器[2]。由于該控制系統采用的AT89C52自身沒有看門狗功能,一旦系統在現場受到突發干擾使程序跑飛,單片機沒有自我保護能力,不能使系統重新工作。為此,本系統采用了MAX706和AT89C52構成的“看門狗”硬件電路,如圖4所示。MAX706是一種性能優良的低功耗CMOS監控電路芯片,其內部電路由上電復位、可重復觸發“看門狗”定時器及電壓比較器等組成[3]。
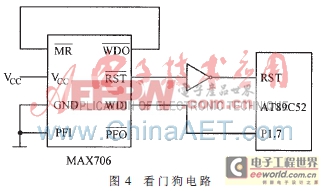
CPU正常工作時,該電路對其不加干預,當CPU工作失常一段時間后,看門狗電路動作,使系統復位重新工作。

pid控制器相關文章:pid控制器原理











評論