機器人示教盒系統的設計

4.3 鍵盤部分的軟件設計
采用Intel 8279通用可編程的鍵盤顯示器接口芯片,由8279控制的鍵盤輸入部分最多為64個觸點的鍵盤,本系統采用32個觸點的鍵盤。先對8279進行初始化:設置8279的工作方式,數碼管顯示采用左端輸入、雙鍵互鎖,編碼掃描方式;設置分頻數使內部工作頻率為100khz;清除8279中FIFO RAM和顯示RAM中的數據。讀鍵盤程序中包括讀出8279中的狀態字,判斷是否有鍵按下,如有,則讀出鍵值,按鍵值進行散轉程序。
4.4 通訊軟件的設計
4.4.1 通訊協議的制定:
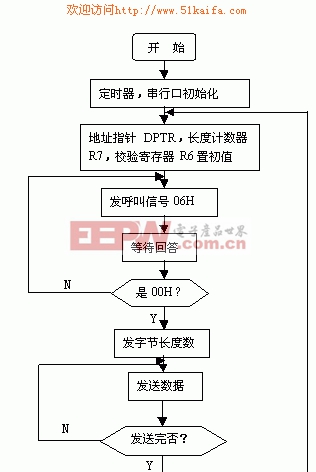
為確保通訊成功,通訊雙方必須在軟件上有一系列的約定,通常稱為軟件“協議”。在該系統中采用的協議如下:
(1)開始通訊時,示教盒發送一個呼叫信號“06H”,詢問主控機是否可以接收數據;
(2)主控機接收到呼叫信號后,若同意接收數據則發回“00H”作應答,否則發“15H”表示暫不能接收數據;
(3)示教盒只有收到應答信號“00H”后,才可把數據發送給主控機,否則繼續向主控機呼叫,直到對方同意接收。
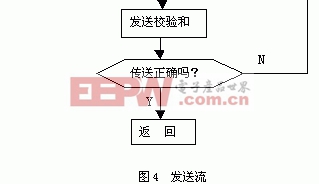
(4)主控機根據接收到的“校驗和”判斷已接收到的數據是否正確。若接收正確,向示教盒回發“0FH”信號,否則回發“F0H”。
(5)示教盒只有接到信號“0FH”才算完成發送任務,否則繼續呼叫,重發數據。
其發送數據格式為:

其中: 字節數:示教盒向主控機發送的數據個數;
數據1~ 數據n :示教盒向主控機發送的n個數據;
累加校驗和:為字節數n,數據1,……,數據n這(n+1)個字節內容的算術累加和。
4.4.2 通訊流程圖
示教盒以查詢方式發送數據,其流程圖如圖4所示。
5 結束語
示教盒已成功的在我校的機器人教學實驗中得到應用,示教盒操作方便,顯示準確無誤,工作穩定,證明示教盒的設計合理。
參考文獻
1熊有倫主編. 機器人技術基礎. 武漢:華中理工大學出版社,1996
2陳光初,趙行初著. 單片微型計算機原理與接口技術. 武漢:華中理工大學出版社,1993










評論