基于單片機的風(fēng)洞模型姿態(tài)控制系統(tǒng)設(shè)計

程序入口:傳感器編號存于A中。
程序出口:α角度存于51H、β角度存于53H。
部分程序如下:
MS: CLR EA ;關(guān)中斷
MOV R2,A ;暫存?zhèn)鞲衅骶幪?P> MOV SCON,#50H ;設(shè)置串口方式
MOV RCAP2H,#0FFH ;自動裝載值
MOV RCAP2L,#0D9H ;
MOV TH2,#0FFH
MOV TL2,#0D9H
MOV T2CON,#34H ;啟動波特率發(fā)生器
…… …… ;發(fā)送采集命令、進制轉(zhuǎn)換
LCALL FCIV ;調(diào)浮點數(shù)運算
…… …… ;進制轉(zhuǎn)換、存數(shù)據(jù)
SETB EZ ;開中斷
RET
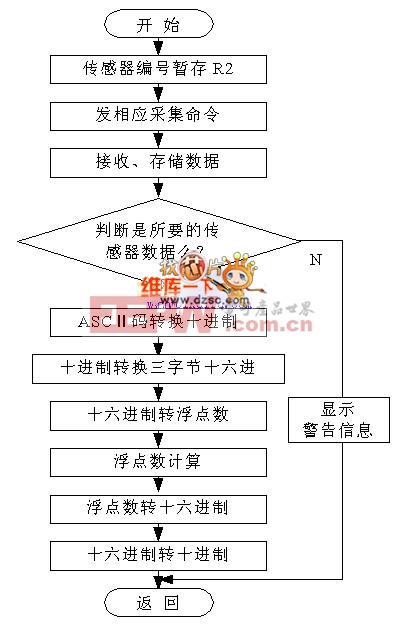
圖3 角度測量流程圖
2.2.2 角度控制程序設(shè)計
風(fēng)洞中模型姿態(tài)的控制分兩部分,一個是當(dāng)前姿態(tài)的測量,一個是計算步進電機需轉(zhuǎn)過的角度,角度的控制是在精確地測量當(dāng)前姿態(tài)的基礎(chǔ)上完成的,程序框圖如圖4所示。
和角度測量相似,模型姿態(tài)需要改變的角度放在累加器中,需要改變的方向放在22H單元中,符號放在23H單元中,通過計算得到驅(qū)動模型轉(zhuǎn)動給定角度所需要的脈沖數(shù),以及該方向電機的控制端口。
部分程序如下:
DJRUN: JZ AOVER
MOV R2,A ; 待轉(zhuǎn)角度存于A中
MOV A,22H ; 模型變化方向












評論