基于MC9S12單片機的智能車數據遠程傳輸系統

隨著社會的快速發展和商業化進程的加速,越來越多的行業和部門需要掌握車輛或其它移動目標的實時信息并能遠程控制目標。這類需求使得車輛數據遠傳控制系統逐漸成為國內外的研究熱點。車輛數據遠傳控制系統通過站點終端及時將車輛信息及行車信息發送到調度站,并實時顯示車輛及道路信息,將實現科學合理調度車輛,減少乘客出行不便,并可傳遞輔助駕駛或避免事故的實時信息,或提供娛樂信息、生活信息等數據服務。
1 車載數據遠傳控制系統的設計與實現
1.1 系統總體設計
車載遠傳控制系統主要包括兩部分:智能車模型和遠傳控制系統。
智能車模型主要由MC9S12核心控制模塊、道路檢測模塊、舵機轉向模塊、速度檢測模塊、電機驅動模塊等組成。智能車模型通過道路檢測模塊來識別道路信息,通過AD轉化信息傳給核心控制模塊,然后由核心控制模塊分析處理,采用PID的控制方式來驅動舵機轉向模塊和電機,從而實現自動尋路行駛。
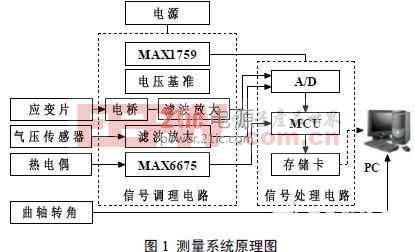
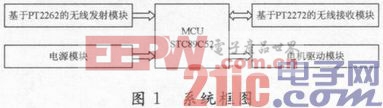
遠傳控制系統由兩塊MC9S12單片機構成主從式結構。中間通過無線收發模塊NRF24L01實現車輛數據及控制命令的遠程傳輸。系統工作時首先由主機發送命令給從機,然后從機與智能車模型上的單片機采用并行口通信的方式傳達主機的命令,同時將模型車此時運行的速度、位置、舵機、電機等參數回傳給主機。如此循環下去,在一個時間周期內實現“主到從,從到主”之間的雙向通信,從而既能接受智能車的數據又能控制智能車。遠傳控制系統結構框圖如圖1所示。

1.2 系統硬件設計
遠傳控制系統的電路模塊,主要有MC9S12單片機最小系統、電源模塊、電機驅動模塊、NRF14L01模塊等。
1.2.1 MC9S12單片機最小系統
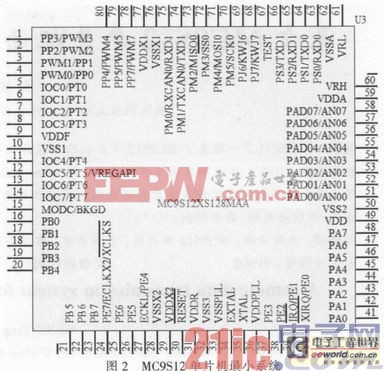
MC9S12XS128只是HCS12X家族中的一個成員。該器件包括大量的片上處理器和外部I/O。MC9S12XS128是一個16位器件,有16位中央處理單元(128KB Flash)、128 kBFlash、8 kB RAM、2 kB EEPROM組成片內存儲器。同時還包括2個異步串行通訊接口(SCI)、2個串行外設接口(SPI)和一個8通道輸入捕捉/輸出比較(IC/OC)增強型捕捉定時器(ECT)、1個16通道10位A/D轉換器(ADC)和一個8通道PWM。圖2為MC9S12XS 128的112封裝引腳圖。

評論