基于AT89C51的智能型小車設計

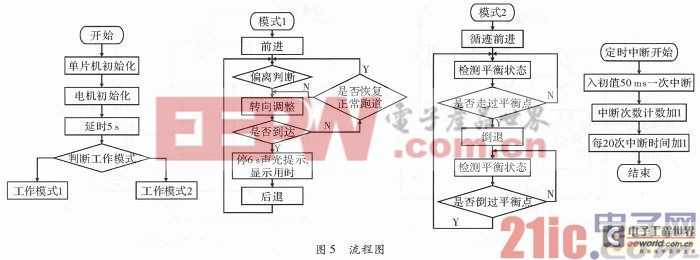
當開機時,系統復位,并判斷工作模式,當選定工作模式1或2后,系統等待5 s,隨后進入自動計時運行狀態。
模式1 為電動車運行及方向調整程序,使電動車按預定路線運行,且在小車偏離軌道后自動調整走向使小車自動返回預定路線,并控制LCD實時顯示運行時間。模式2為平衡檢測及平衡保持程序,在此程序控制下小車自動尋找平衡點,并在平衡點附近進行正向或反向運行,最終達到動態平衡,具體流程如圖5所示。
4 系統測試
在平衡板自由的狀態下往返一次全程的時間,如表1所示。平衡板在自由狀態下小車載重物100 g保持平衡測試,如表2所示。平衡板在水平狀態時,往返一次全程的時間,如表3所示。壓線定位測試,如表4所示。


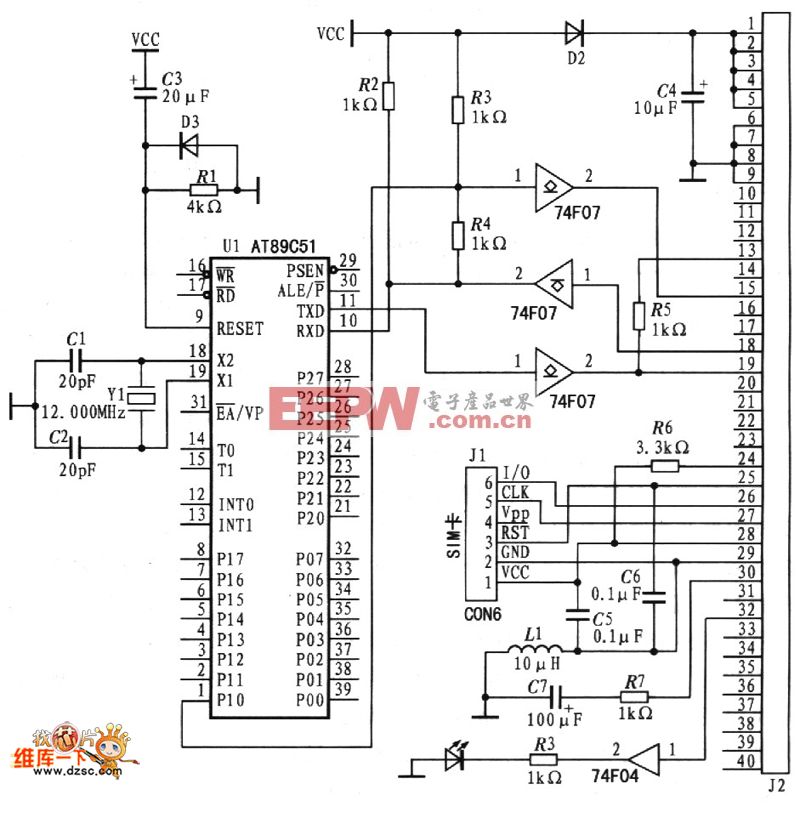
由測試分析可看出:基于AT89C51最小系統的小車檢測和控制系統,通過紅外發射接收一體探頭檢測路面黑色尋跡線,使小車按預定軌道行駛,根據角度傳感器檢測平衡板的平衡狀態控制小車,使其在平衡板上達到動態平衡,實現了智能控制


評論