基于SPCE061A的智能小車機(jī)器人電路設(shè)計(jì)

SPCE061A 是一款16位獨(dú)具語(yǔ)音特色的控制器, 片內(nèi)采用的nSPTM ( microcontro ller and signal processor) 核心處理器, 具有較高的處理速度, 能夠完成16位算術(shù)邏輯運(yùn)算、16 × 16位硬件乘法運(yùn)算和DSP內(nèi)積濾波運(yùn)算, 能夠快速處理復(fù)雜的數(shù)字信號(hào), 不需要額外的專用語(yǔ)音控制芯片, 就能實(shí)現(xiàn)語(yǔ)音的編解碼等, 既節(jié)省了設(shè)計(jì)成本, 又能滿足一定的控制要求。控制器采用模塊化架構(gòu), 集成了ICE(在線仿真)、鎖相環(huán)振蕩器、時(shí)基控制器、7通道10位AD轉(zhuǎn)換器、單通道AD+ AGC(自動(dòng)增益)轉(zhuǎn)換器、雙通道10位DA轉(zhuǎn)換器、通用異步通信接口、串行輸入輸出接口、電壓監(jiān)控等模塊。
本文引用地址:http://www.104case.com/article/201710/369454.htm語(yǔ)音輸入電路設(shè)計(jì)
小車的語(yǔ)音輸入電路如圖2所示。其中, VM IC 提供傳聲器的電源, VSS是系統(tǒng)的模擬地, VCM 為參考電壓, 1腳和2腳分別是傳聲器X1 的正極、負(fù)極的輸入引腳。當(dāng)對(duì)著傳聲器講話時(shí), 1腳和2 腳將隨著傳聲器輸入的聲音產(chǎn)生變化的波形, 并在SPCE061A 的兩個(gè)端口處形成兩路反相的波形, 送到SPCE061A 控制器內(nèi)部的運(yùn)算放大器進(jìn)行音頻放大, 經(jīng)過(guò)放大的音頻信號(hào), 通過(guò)ADC轉(zhuǎn)化器轉(zhuǎn)化為數(shù)字量, 保存到相應(yīng)的寄存器中, 然后對(duì)這些數(shù)字音頻信號(hào)進(jìn)行壓縮、辨識(shí)、播放等處理。
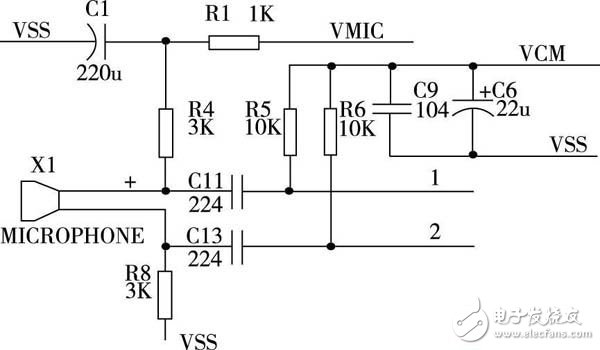
圖2 語(yǔ)音輸入電路
語(yǔ)音輸出電路設(shè)計(jì)
小車的語(yǔ)音輸入電路如圖3所示。其中, VDDH 為參考電壓, VSS是系統(tǒng)的模擬地。音頻信號(hào)由SPCE061A 的DAC引腳輸出送到電路的9端, 通過(guò)音量電位器R9的調(diào)節(jié)端送到集成音頻功率放大器SPY0030, 經(jīng)音頻放大后, 音頻信號(hào)從SPY0030輸出經(jīng)J2端口外接揚(yáng)聲器播放聲音。
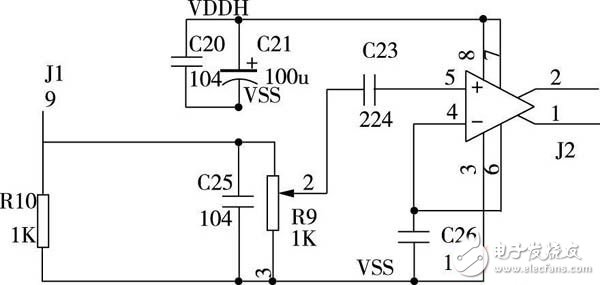
圖3 語(yǔ)音輸出電路
光電檢測(cè)電路設(shè)計(jì)
小車的光電檢測(cè)電路采用E18-D80NK型號(hào)的光電傳感器, 它集發(fā)射和接受于一體, 紅外發(fā)射管向某一方向發(fā)射紅外線, 遇到障礙物后紅外線被反射由接收管接受, 從而判斷出小車的前方是否有障礙物, 對(duì)障礙物的感應(yīng)距離可以根據(jù)要求通過(guò)傳感器上的微調(diào)旋鈕進(jìn)行調(diào)節(jié)。傳感器前端增加了透鏡, 利用聚焦作用遠(yuǎn)距離探測(cè)物體。傳感器內(nèi)部集成了放大、比較、調(diào)制電路, 使傳感器受可見(jiàn)光的影響較小, 光電檢測(cè)電路的連接圖如圖4所示。
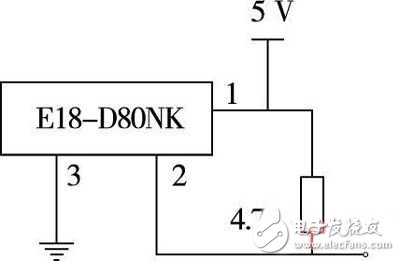
圖4 光電檢測(cè)電路
驅(qū)動(dòng)電路設(shè)計(jì)
小車的驅(qū)動(dòng)電路是一個(gè)全橋驅(qū)動(dòng)電路, Q1,Q2, Q3, Q4四個(gè)三極管組成4個(gè)橋臂, Q5 控制Q2和Q3的導(dǎo)通和關(guān)斷, Q6控制Q1 和Q4 的導(dǎo)通和關(guān)斷, 驅(qū)動(dòng)電路分別用于后輪動(dòng)力驅(qū)動(dòng)電路和前輪方向驅(qū)動(dòng)電路。當(dāng)1管腳為高電平, 2管腳為低電平時(shí)時(shí)Q1 和Q4 導(dǎo)通, Q2和Q3截止, 電動(dòng)機(jī)帶動(dòng)車輪運(yùn)轉(zhuǎn); 當(dāng)1管腳為低電平, 2管腳為高電平時(shí)時(shí)Q1和Q4截止, Q2和Q3導(dǎo)通, 電動(dòng)機(jī)帶動(dòng)車輪反向運(yùn)轉(zhuǎn)。
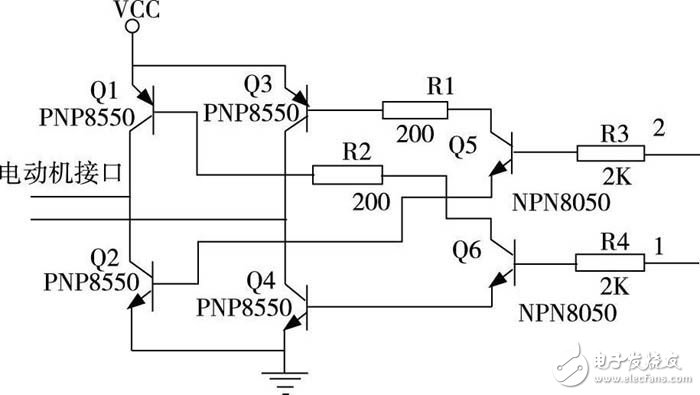
圖5 驅(qū)動(dòng)電路
將語(yǔ)音輸入電路的1, 2 端口分別連接到SPCE061A控制器的M ICP, N ICN 管腳上; 將語(yǔ)音輸出電路的9端口連接SPCE061A的DAC1管腳; 后輪動(dòng)力驅(qū)動(dòng)電路的1, 2端連接到SPCE061A的IOB8, IOB9管腳, 前輪方向驅(qū)動(dòng)電路的1, 2端連接到SPCE061A 的IOB10, IOB11管腳; 光電檢測(cè)電路的OUT 端連接SPCE061A 的IOB12 管腳, 智能小車的整體連接如圖6所示。

圖6 智能小車整體連接圖
介紹了一種基于SPCE061A 的智能音控小車機(jī)器人的設(shè)計(jì)過(guò)程, 給出了智能小車的硬件構(gòu)成。從軟件設(shè)計(jì)的角度闡述了小車使用語(yǔ)音辨識(shí)和中斷技術(shù)的智能控制算法, 并詳細(xì)說(shuō)明了語(yǔ)音辨識(shí)技術(shù)在智能小車上的實(shí)現(xiàn)過(guò)程。實(shí)驗(yàn)表明智能小車運(yùn)作良好。












評(píng)論